

鱼类在水中的运动机理堪称完美,因而仿照鱼类运动机理而制作出的潜水器具有噪声低、速度快、功耗小、隐蔽性高等特点。因此鱼类有着极大的仿生价值,本项目旨在通过对鱼类在水中运动方式的深入研究,结合机械设计与智能控制,制作出有着较高仿生性的鱼形潜水器,通过加载不同的功能单元从而使其能够应用于军事侦察、海洋生态拍摄等各种领域,填补水下探索领域的不足。
1、通过查阅文献,学习相关流体力学知识,深入了解鱼类在水中的运动机理,鱼身各处可用代替材料等,为高度仿生的鱼形潜水器的制作提供理论基础。
2、完成机械鱼的模型设计,模型应在理论上能够完成游动、上浮、下潜、悬停等一系列运动,此外,机械鱼内部留出足够空间保证其可塑性,便于根据不同需求搭载各种功能单元,比如图像采集与传输单元、无线控制单元、电池等。
3、完善电控单元,根据机械模型设计相应的电控单元,用以支持远程控制以及各种功能的实现。完善细节,做好防水工作,规划好内部空间使用等等。
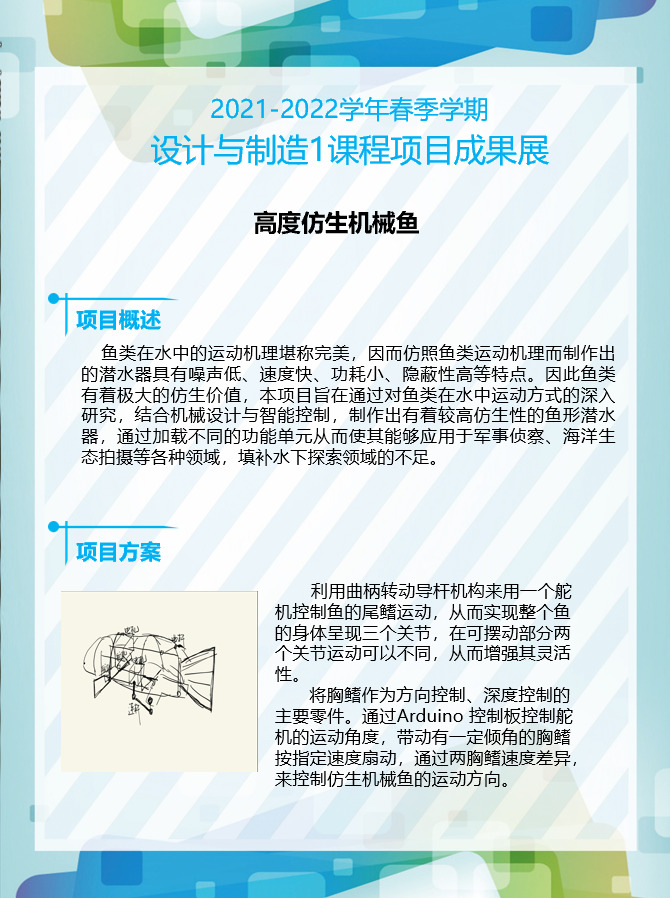
对于鱼类运动机理的研究有一定进展,理论上验证了高度仿生机械鱼的可行性。目前机械鱼的模型制作已基本完成,整体具有两自由度以及流线型外形,曲柄传动导杆机构实现了一个舵机控制两个鱼尾关节的运动的目标,能够保证在高度模仿鱼类运动的基础上最大限度的简化潜水器,保证内部有足够可利用空间,同时也能够控制潜水器本身的成本。通过鱼身摆动与胸鳍的配合,理论上实现了机械鱼升降和运动的所有可能。确定了实体制作方案,对于如何实现其电控单元也有一定的研究。
