
为了方便同学们将更多的精力花在乒乓球竞技而不是毫无意义的捡球上,本小组模仿了章鱼的生理特性和外形,制作了“章鱼抓球器”。本小组计划将抓球器设计成章鱼的外观,通过机械臂的形式控制触手的上下移动,并且在每条触手上安装吸盘结构,在头部控制中枢中加入图像识别装置,从而实现自动识别乒乓球,并且移动过去利用吸盘吸起一个或多个乒乓球,触手最后再抬起,最终完成了这一捡球的过程。在日常的乒乓球运动中,本小组制作的“章鱼抓球器”可以有效地帮助运动者节省捡球所消耗的大量体力,并且可以自动移动和拾取多个乒乓球,具有一定的市场竞争力。
抓球器整体高度与乒乓球台相近,便于伸手即可拿到抓取上来的乒乓球;仿照章鱼的生理与外观特性,设计出形状相似的触手结构,并在其上安装吸盘和抽气机用于吸取乒乓球,从而模仿出章鱼捕食的过程;整个抓球过程尽量实现全自动操作,即抓球器自动寻找到乒乓球(可通过利用Pytorch进行对于乒乓球识别的深度学习来实现),之后自动打开抽气机同时吸取地面上的多个乒乓球,检测到乒乓球被吸取成功后自动控制机械臂触手弯折,将乒乓球抬移上来。
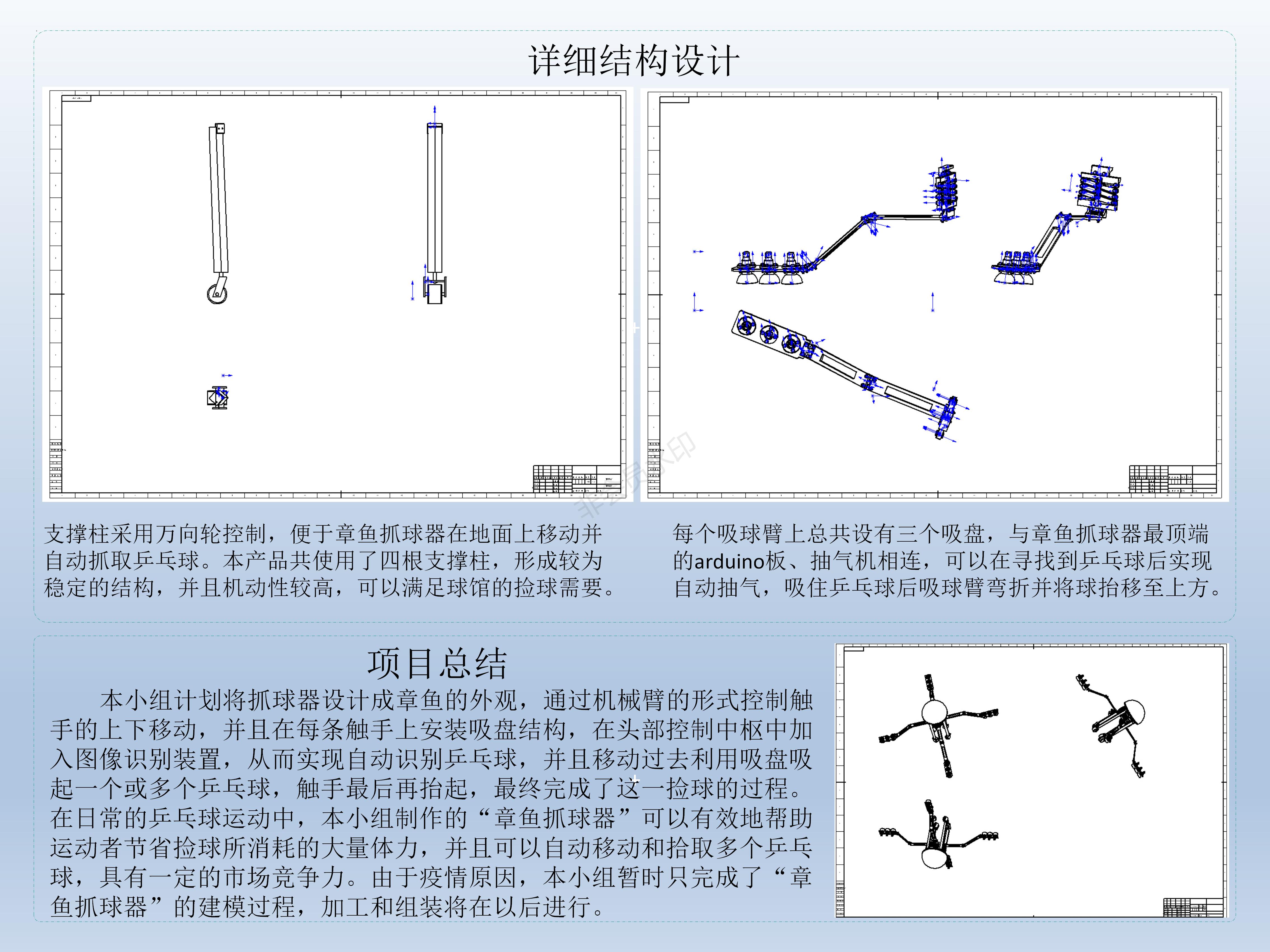
本小组完成了建模工作,最上方的部分是矩形平台,其上预计用来放置arduino板、抽气机、供电装置、摄像机等电子设备,其下连接四只抓手和四根连有万向轮的立柱。抓手由机械臂和吸盘两部分组成,可以通过arduino板控制舵机的转动,从而使整个触手伸展或收缩,并且能通过arduino板控制抽气机是否工作,从而利用吸盘将乒乓球从地面上吸起。由于疫情原因,本小组很遗憾没有将搭建好的模型进行3D打印与组装。但是本小组已经将零件的尺寸设计完毕,并且编写好了相关的电控模块所需的代码。

