

随着十四五计划出台,国家对于生态的重视程度不断提高。水资源的检测和治理、水下生态环境的勘探和调查,成为保护生态环境不可或缺的重要环节。然而在现有的水质检测、水环境勘探的过程中,水质检测设备以定点采样为主,并集中在岸边浅滩处,难以对全局水域做到动态检测;而采用人工潜水方案,则人力成本和经济成本过大,无法广泛推广。
基于这一背景,小组计划开发一种仿生蝠鲼潜水器,其具备在水下游动、悬停的基本功能,并进一步开发水质采样,摄像勘探的功能。
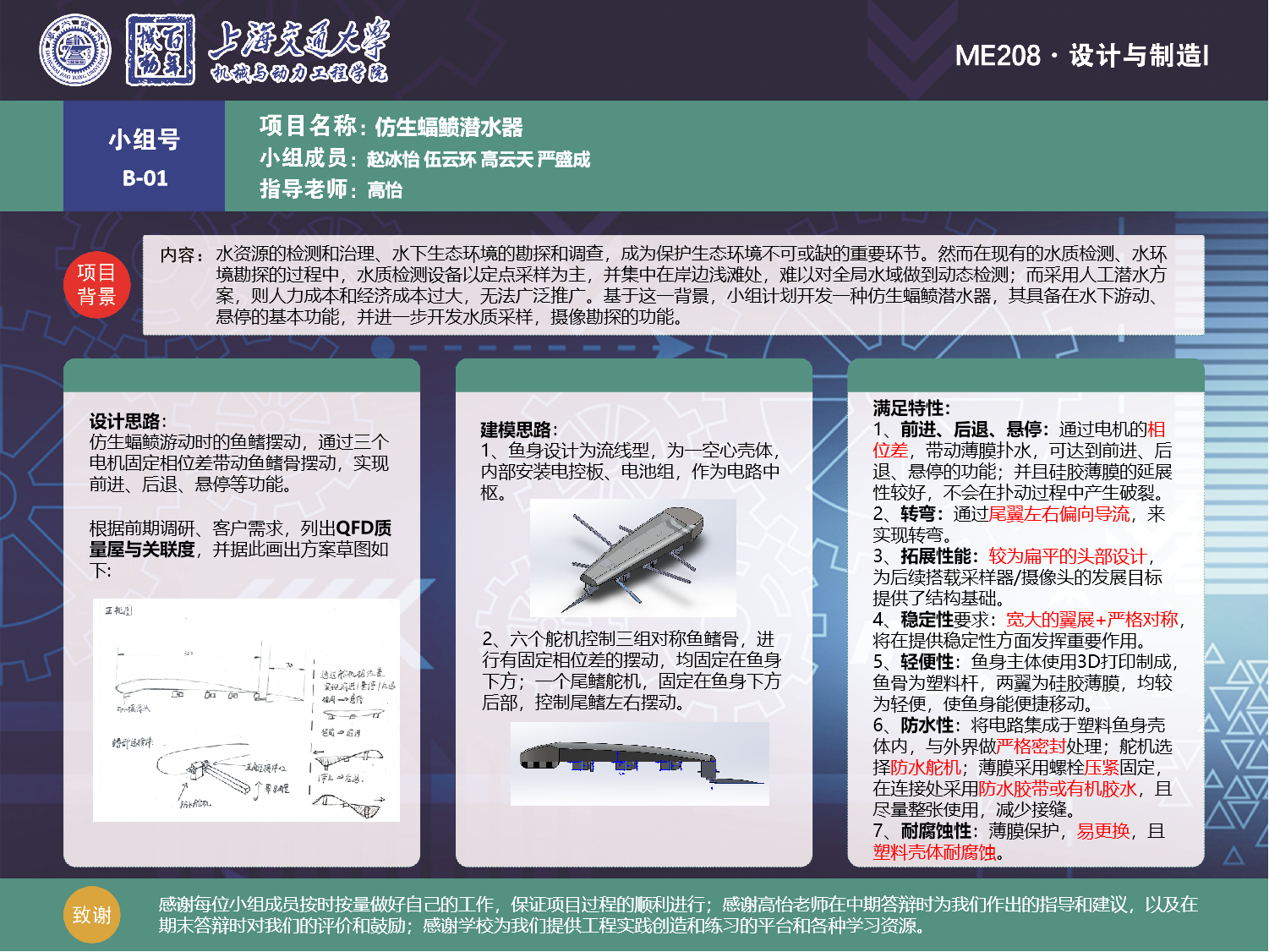
l 基本运动控制:实现水下的前进、后退、悬停、转向
l 拓展性:为后续搭载摄像头/采样器提供结构基础
l 稳定性:通过电控的调节,使潜水器能在水下平稳运动
l 轻便性:通过材料选择和结构设计控制整体重量和体积
l 防水性:将电路集成于塑料鱼身壳体内,并完善密封防水措施
l 耐腐蚀性:材料选择及防腐蚀处理
l 易操作性:采用合理有效的结构设计,并进一步开发电控系统
l 经济性:统筹规划整体预算
l 开展市场调研,精准归纳用户需要,制作对应QFD图
l 对不同草案的可行性及合理性做分析讨论,经过不断改善优化得出最终方案
l 制作得到产品的3D建模,并完善各零件图及尺寸标注
l 精确评估零件需要(舵机个数,薄膜面积等),预算控制合理
