
我们组计划设计一个以刺魟为原型的水陆两用仿生机器鱼,期望这个机器人能够实现在水中平稳快速地运动,并且能够实现上浮下潜悬停转弯等操作,同时也能在陆地上进行简单的平面运动。在实际生活中,这台仿生鱼可以实现辅助水面情况探测以及轻量物资运输等功能。
在项目实施的过程中,我们主要可能会面临以下几个难点。首先是推进方式及推进效率问题,我们知道,鱼类的高效率与其完善的流体性能有关,我们要制作出前进阻力较小的机身,同时两侧的驱动结构也要实现转向等功能,结构需要兼具一定的强度和柔韧性,对材料的选取有一定的要求。其次是机器鱼的机动性能与方向操控性能。我们需要机器鱼在水中以及陆地上能够实现简单的转向,并且拥有一定的方向准确性。
设计一个以刺魟为原型的水陆两用仿生机器鱼,期望这个机器人能够实现在水中平稳快速地运动,并且能够实现上浮下潜悬停转弯等操作,同时也能在陆地上进行简单的平面运动。同时在实际生活中,这台仿生鱼可以实现辅助水面情况探测以及轻量物资运输等功能。
1、QFD图

2、草图

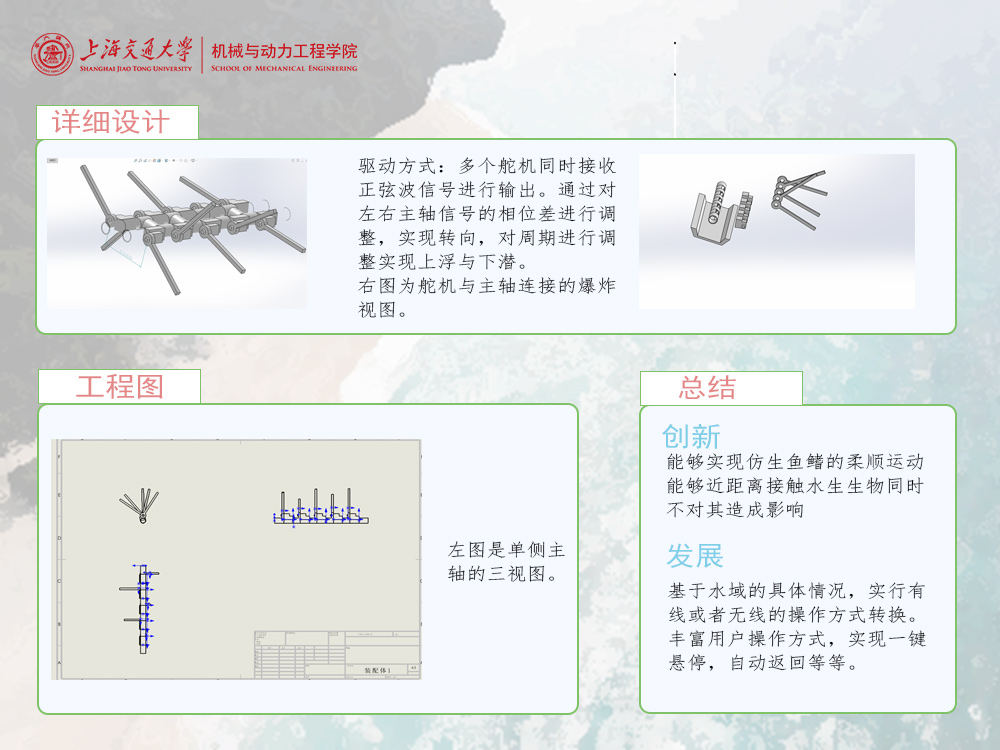
3、三维模型

同时,我们考虑以能够实现仿生鱼鳍的柔顺运动为标准,因此低弹性模量的非金属材料是优先考虑对象,如橡胶、软塑料等等。但过柔会使得鳍面形状不可控制,降低推进性能。初步决定选择硬铝条,乳胶薄膜作为表面的蒙皮。
最终我们初步找到了解决方案,基本满足了我们的用户需求。能够实现采用陆上遥控的方式进行水下的检测操作,遥控距离需求与信号传输强度有关,基于现有的条件,我们需要购买好的信号传输装置,另外关于安全性等需求也能得满足。后期我们希望能够基于装置体积的大小,尽可能多的增加其功能,安装定位系统等等,优化用户操作方式,比如一键上浮,自动悬停键等等。
