
高空作业始终是众多领域不可回避的一项工作内容,常常耗费大量的人力和时间,且带有一定的的安全隐患。小组成员从动物行为中获得灵感,利用仿生学设计了一套爬杆机械装置,以代替人力完成高空作业工作。这款装置能够携带负载沿柱状物爬升,通过预设程序或远程控制完成指令,运输自动化装置从而完成高空作业。
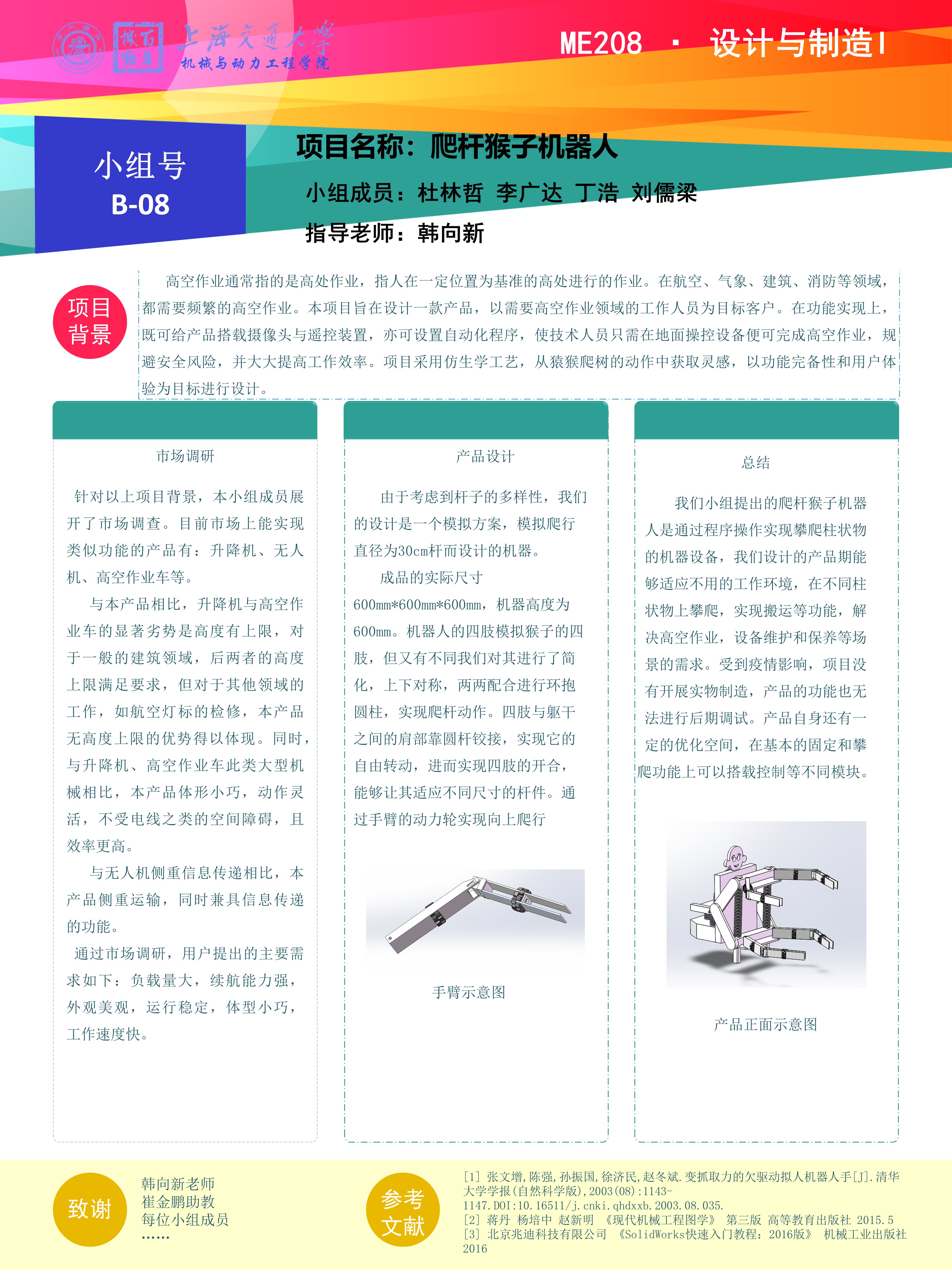
本项目旨在设计一款产品,以需要高空作业领域的工作人员为目标客户。在功能实现上,既可给产品搭载摄像头与遥控装置,亦可设置自动化程序,使技术人员只需在地面操控设备便可完成高空作业,规避安全风险,并大大提高工作效率。
通过市场调研,用户提出的主要需求如下:负载量大,续航能力强,外观美观,运行稳定,体型小巧,工作速度快。与高空作业车和无人机进行市场竞争能力评估,我们得出产品的主要目标是在工作速度,体型,外观美观和运行稳定向上等方面占据优势。
经过主要两轮设计和细小的调整,本产品已具备预期的所有功能。我们小组提出的爬杆猴子机器人是通过程序操作实现攀爬柱状物的机器设备,我们设计的产品能够适应不用的工作环境,在不同柱状物上攀爬,实现搬运等功能,解决高空作业,设备维护和保养等场景的需求。受到疫情影响,项目没有开展实物制造,产品的功能也无法进行后期调试。产品自身还有一定的优化空间,在基本的固定和攀爬功能上可以搭载控制等不同模块。
