
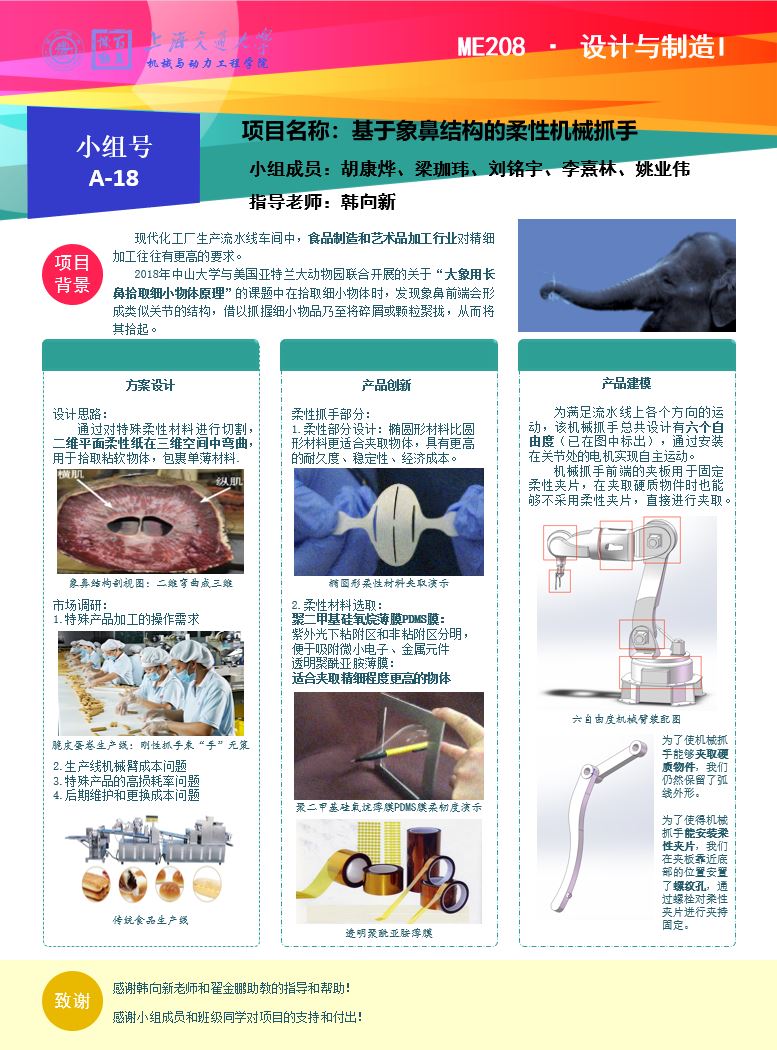
现代化工厂生产流水线车间中机械臂具有非常广泛的应用,在食品制造和艺术品加工行业中对精细加工往往有更高的要求。小组成员从大象鼻部拾取物体的原理中汲取灵感,设计了一款基于象鼻结构的柔性机械抓手,通过纸张裁剪技术和多自由度机械臂装置实现对粘软、细小等不易抓取物体的稳定控制,并通过排列、组合、放大等方式实现不同尺寸、不同规则物体或多个物体的抓取。
1) 满足特殊产品加工的操作需求:实现对粘软(面包、芝士片)、细小光滑(玻璃珠)产品的加工抓取要求。柔性机械抓手能够兼备精准度(夹取物体的成功率)、稳定性(物体不掉落、损耗)和灵活性(夹取物体的角度、松紧可灵活变化,方便加工)。
2) 解决生产线机械臂成本问题:在实际生产过程中,不同规格、形状、品种零件夹取加工对于机械臂有不同的设计需求,需要大量不同型号的传统机械臂。针对降低机械臂配置的调度成本的问题,柔性机械抓手要具备对于夹取物体的普适性。
3) 降低特殊产品的损耗率:食品制造和艺术品加工生产线中,因为传统机械抓手的刚性特质导致产品损耗,从而造成经济损失。
4) 压缩后期维护和更换成本:传统机械抓手易磨损老化,更换困难;应用在食品行业也很难满足行业卫生要求。
1) 完成项目机械臂部分建模,实现六自由度机械臂控制
2) 成功选取柔性材料并设计仿生象鼻前端部分
