
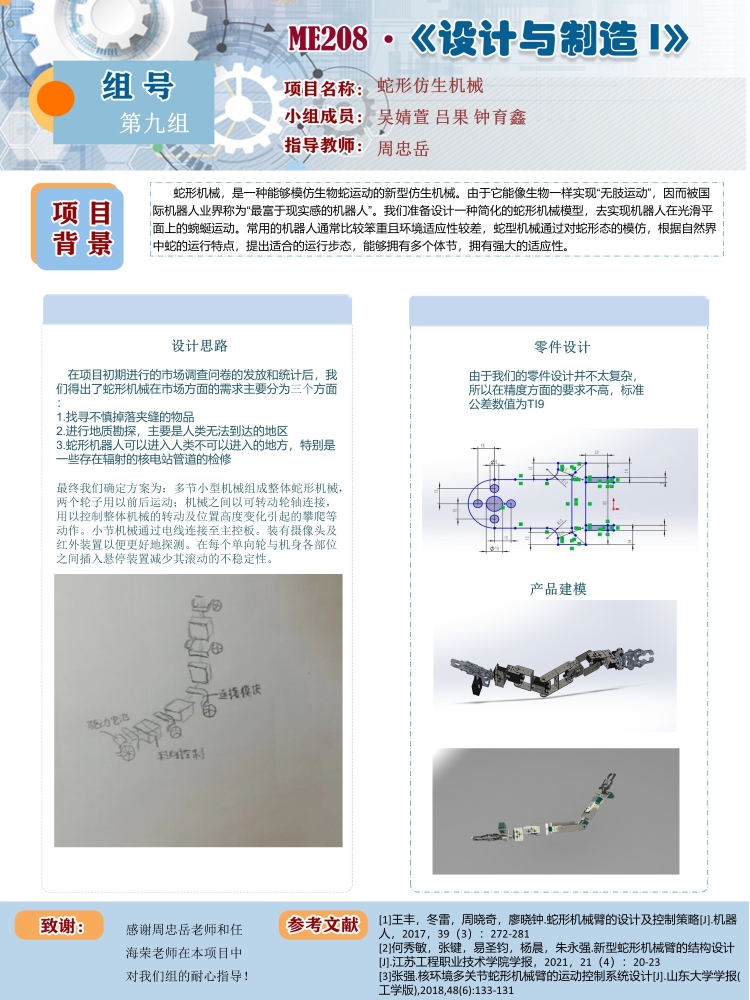
我们组的项目是蛇形仿生机械。机械整体为多节小型机械组成整体蛇形机械,两个轮子用以前后运动;机械之间以可转动轮轴连接,用以控制整体机械的转动及位置高度变化引起的攀爬等动作。小节机械通过电线连接至主控板。装有摄像头及红外装置以便更好地探测。在每个单向轮与机身各部位之间插入悬停装置减少其滚动的不稳定性。设计的重点主要放在细长形状和便于控制两项易于实现且需求较高的特性上,其余的或多或少由于技术不到位暂时无法实现。由于技术原因我们没有使用电源,但是可以作为后续考虑问题。
在项目初期进行的市场调查问卷的发放和统计后,我们得出了蛇形机械在市场方面的需求主要分为四各方面:
1.找寻不慎掉落夹缝的物品
2.进行地质勘探,主要是人类无法到达的地区
3.进入人体器官(如肠道、血管)完成手术和定点给药
4.蛇形机器人可以进入人类不可以进入的地方,特别是一些存在辐射的核电站管道的检修
但是在设计过后我们发现,第三点用作医疗用途的实现太过于困难,因此在原有基础上,我们放弃了医疗用途这一目标,着眼于其他的三个目标。
我们在最终使用了三维建模的方式将作品呈现了出来,由于没有现实成果因此还有很大的提升空间。首先,在阅读部分文献后,我们认为如果可以优化,那么我们可以将蛇形机械更进一步做成蛇形机械臂。这种机械臂由两部分组成,可以将我们装置中的主题零件更换为两组正交关节,这样就可以实现在三维空间里的各向移动,而并不只局限于某几个方向的水平移动。市面上的蛇形机械臂大多是以万向节连接,但是正交连接方式有以下几点原因使其在蛇形机械臂上具有应用的意义:(1)正交关节的工作空间完全能够满足蛇形机械臂在狭小空间内的工作求;(2)通过改进驱动机构完全可以克服正交 关节所需数量多的问题;(3)正交连接配合驱动绳索进行驱动的方式,十分容易实现角度反馈控制, 因此在建模与控制方面有特殊的优势.
另一方面,如果将连接结构模块化,也可以达到上述的效果,即令连接处的转角范围更大,从而使机械能够在更大的范围移动,更加灵活,从而达到设计的初衷。
而如果要在核环境中工作,即达到核电站管道检修的设计目的,那就需要机械臂系统在执行全舱探测或维护作业时,共分为两种运行模式: 待机模式和工作模式。在EAST 核聚变试验装置工作时,聚变反应舱的内部环境温度极高,且中子辐射较强,不适宜多节机械臂进入其中作业,此时多节机械臂位于聚变舱外部,存放于系统存储装置内,处于待机模式; 在 EAST 聚变等离子体放电的间歇期,当需要执行遥操纵作业任务时,多节机械臂从系统存储装置受到后端直线轨道推进装置的作用开始行进,通过位于聚变舱赤道面的工作窗口,到达舱内指定位置并执行作业,处于工作模式。这样的设计我们暂时无法完成,因此只能初步做出机械的雏形。
