
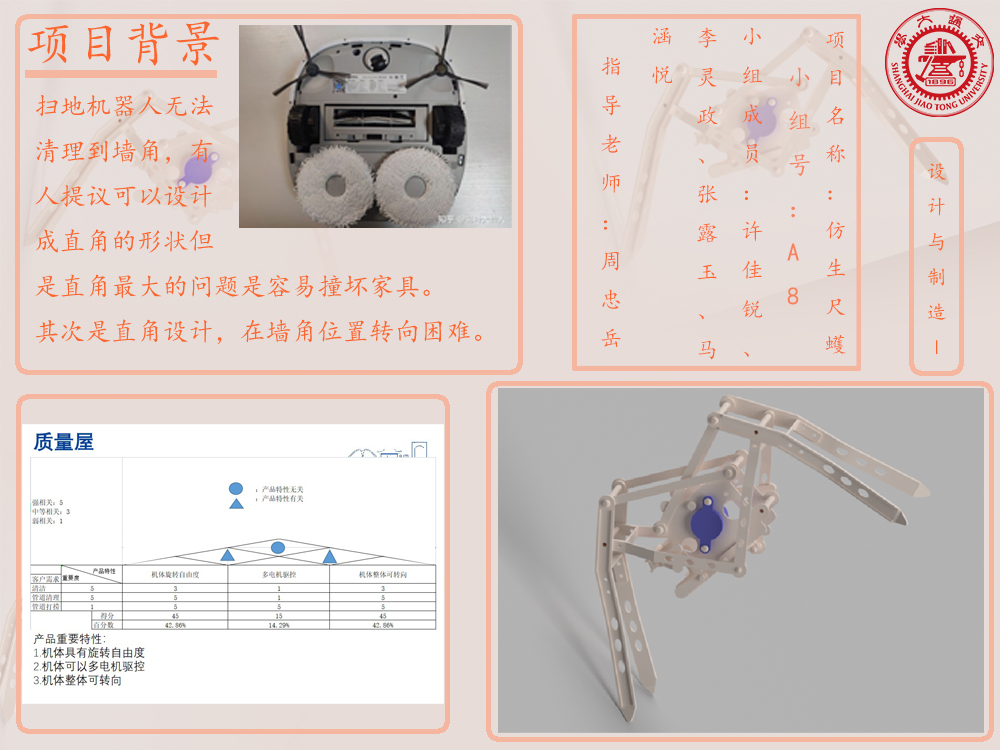
扫地机器人无法清理到墙角,有人提议可以设计成直角的形状,但是直角最大的问题是容易撞坏家具。其次关于直角设计,在墙角位置转向会十分困难。管道清洗机器人可代替人工进入管道清洗,解决了人们对油污粘在身上的烦恼,可以用机器人进入管道清洗,也可解决狭小空间无法清洗的烦恼,危险难度也降低了。
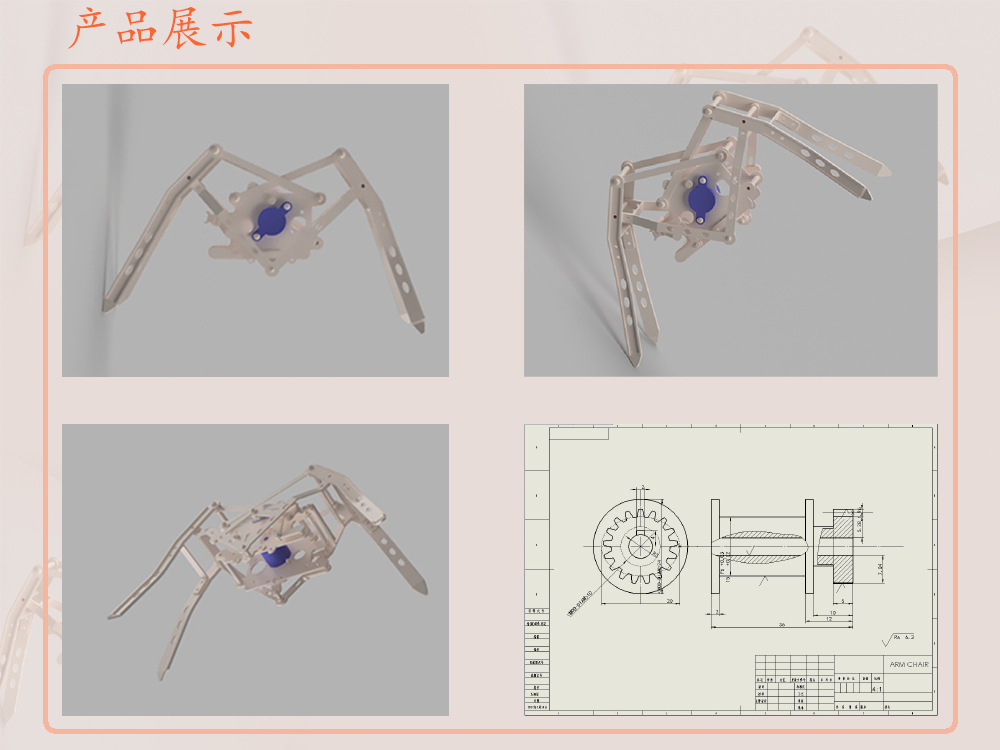
我们小组的项目是通过尺蠖的运动仿生和结构仿生实现产品模拟尺蠖的运动,最终希望呈现的产品是类尺蠖的机械结构,相关的使用功能通过后期的外设加工加以实现。
模拟尺蠖的运动,搭建仿生尺蠖机体。我们组项目方案设计涉及的软体机械,大体仍以研究为主,产业化的实用产品不多。
我们组的产品主要具有的特征为:
1.机体具有旋转自由度
2.机体多电机多舵机操控
3.机体整体可转向
使用两个舵机、两个电机实现多自由度控制。两边的驱动部位分装两个电机,其中一个电机控制机体的转动,一个电机控制机体整体的移动,从结构仿生出发,由内部的齿轮传动带动偏心轮,实现中间连杆的上下浮动,再通过铰接,使得上下浮动变成足部的运动,从而实现机体的弓起。
小组完成了模型的建构和运动配合,制作了装配动画、运动动画并做出了最后的渲染图。
建模是仿生尺蠖的灵魂,也是实现运动模仿的基础。小组成员从零开始建构,一步步搭建仿生尺蠖的3D模型,在这个过程中不仅挑战了自己,也学到了很多东西。
仿生尺蠖最大的难点在于其运动的模仿,后期运动配合是整个产品设计过程中最花费时间的。运动动画在配合完成后是水到渠成的。工作过程中深刻感受到了建模人员的复杂构思,算得上是一次愉快的合作。
