
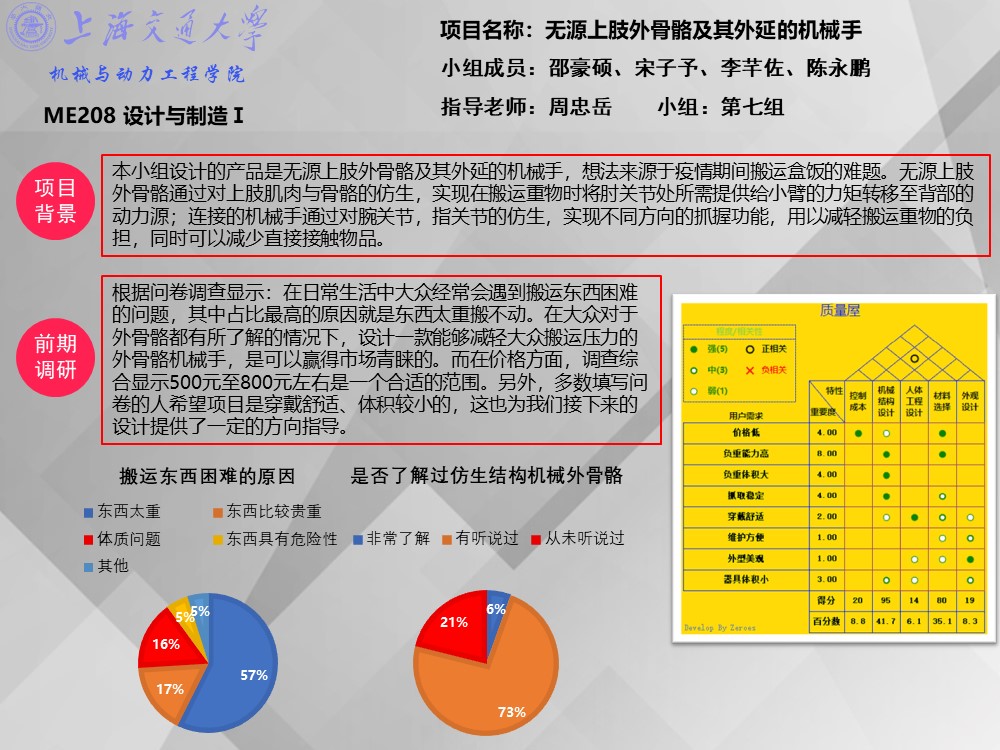
本小组设计项目是无源上肢外骨骼及其外延的机械手。无源上肢外骨骼通过对上肢肌肉与骨骼的仿生,实现在搬运重物时将肘关节处所需提供给小臂的力矩转移至背部:主要采用刚性杆的强度结构传递载荷,肩带,腰带与支撑结构将载荷合理分布于背;外延部分的机械手通过对手指肌肉与骨骼的仿生,实现相对复杂的抓握功能:通过舵机控制与机械结构自身的几何约束,机械手的三根手指各有一个自由度,预留了腕关节处的连接孔位,用以连接无源上肢外骨骼。
通过问卷调研发现日常生活中大众经常会遇到搬运东西困难,特殊时期也会遇到接触污染的风险。为解决这些问题,本小组提出无源上肢外骨骼及其外延的机械手项目。项目目标是满足减轻搬运重物的负担以及减少直接接触物品的需求:减轻搬运重物的负担这一功能旨在解决搬运水桶、行李箱上下楼,疫情期间搬运物资及相似问题;减少直接接触物品这一功能旨在解决疫情期间搬运物资的同时避免污染物资、保护自身安全,抓握有毒有害的化学品或有一定放射性的污染物。此外,产品应尽可能保证产品质量可靠,制造成本低以及使用安全。
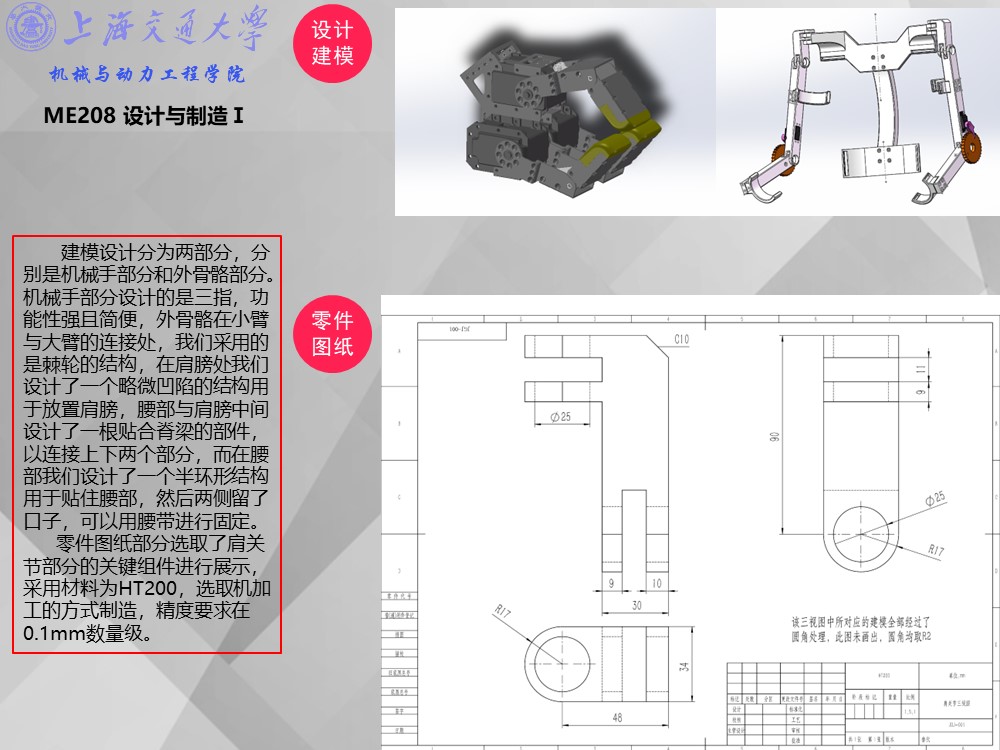
经过设计构思与初步调研,无源上肢外骨骼及其外延的机械手项目的主体部分实现了在Solidworks中的实体建模。无源上肢外骨骼通过肘关节连接处的棘轮的结构,通过舵机驱动棘轮锁定肘关节,降低肱二头肌负担,外骨骼的强度结构可以将搬运重物时手臂受到的力量分散至腰背,从而实现减轻搬运重物的负担的功能;外延的机械手通过指套的传感器控制,由舵机驱动,由于五指操控较为复杂,而二指结构又太简单,能实现的功能较少,三指的结构可以很好的平衡这两点,因此机械手采取了三指的结构,可以做出一些相对复杂的抓握动作,从而实现减少直接接触物品的功能。产品主体无源上肢外骨骼部分是纯机械结构,且加工工艺要求不高,保证了系统的可靠性与稳定性,同时降低了制造成本,结构边缘倒角处理,为使用安全提供可靠保障。
