
目前实现在水平面上移动或借助空气在空中移动的机器人产品较多,但是能够在垂直面上运动的机器人并不多见。能够在垂直面上运动的机器人相比有以下优势:与一般机器人相比能够更轻易地跨越大型障碍物;与空中移动的机器人相比能大幅节省能源;且有广泛的应用前景,如高大建筑物外墙清洁、特殊地形、情况物资运送等。
本设计探索更加自由的爬壁机器人的可能性与实践性,通过设计任务相对简单的清洁墙体的爬壁机器人探索未来更加自由的爬壁机器人的更广泛的应用。
通过本次项目,设计能够满足要求的模型,并在完成项目的实践过程中练习、运用课堂所学知识。
通过调查问卷、质量屋等分析方法,得知重要的产品特征为运动机构、电控设计和吸附机构等。其中运动机构对产品的安全性、清洁速度有重要影响,电控设计对产品的续航和运动有影响,吸附机构对产品的安全和清洁能力有较大影响。产品竞争力主要体现在运动机构和吸附机构的设计,且是本课程的重点,因此小组的重点目标是完成吸附机构和运动机构的设计。
经过一学期的工作,我们完成了绝大部分开题时提出的目标。
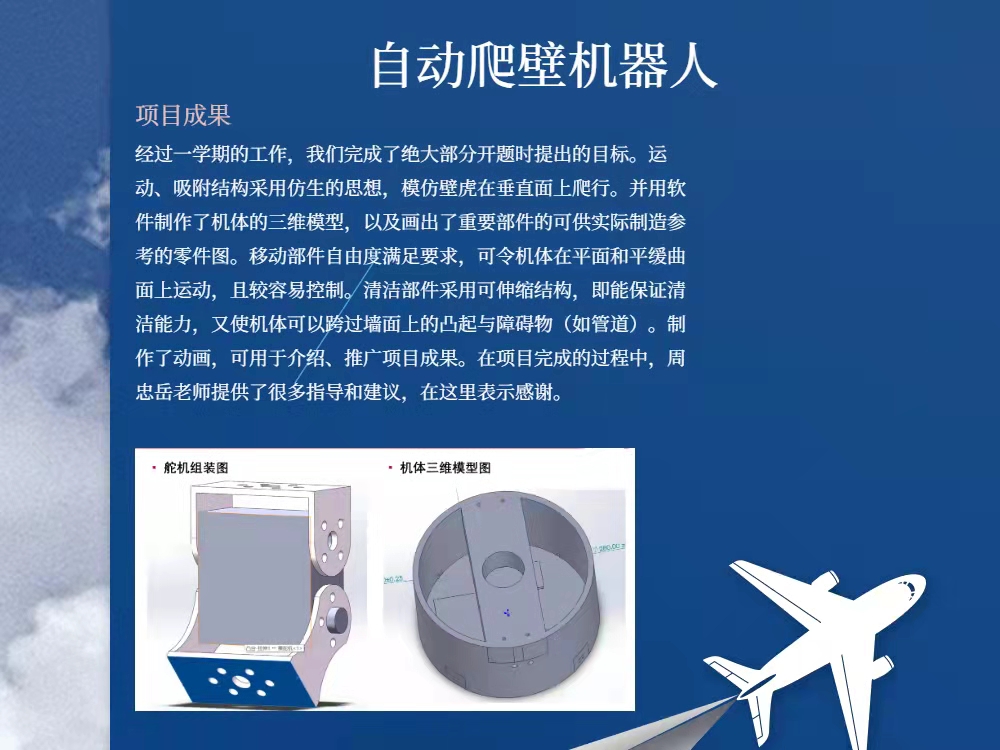
运动、吸附结构采用仿生的思想,模仿壁虎在垂直面上爬行。并用软件制作了机体的三维模型,以及画出了重要部件的可供实际制造参考的零件图。移动部件自由度满足要求,可令机体在平面和平缓曲面上运动,且较容易控制。清洁部件采用可伸缩结构,即能保证清洁能力,又使机体可以跨过墙面上的凸起与障碍物(如管道)。制作了动画,可用于介绍、推广项目成果。
在项目完成的过程中,周忠岳老师提供了很多指导和建议,在这里表示感谢。
