

在仿生机械学中,模仿生物蛇而衍生的机器蛇拥有良好的研究前景。这是因为仿生机器蛇拥有多于普通机器人保持空间位置和姿态所需要的自由度,使得它可模仿生物蛇的运动状态,从而能够适应各种自然环境,因而在许多领域都具有广泛的应用前景。本项目提出了一种多关节的车轮运动的长条形仿生机器蛇,并对其进行了仿真建模。这是一种新型的机器人,与传统的两足步行式机器人不同之处在于,它可以像蛇一样蜿蜒的运动,适应性强,能够在各种复杂地形中完成任务。
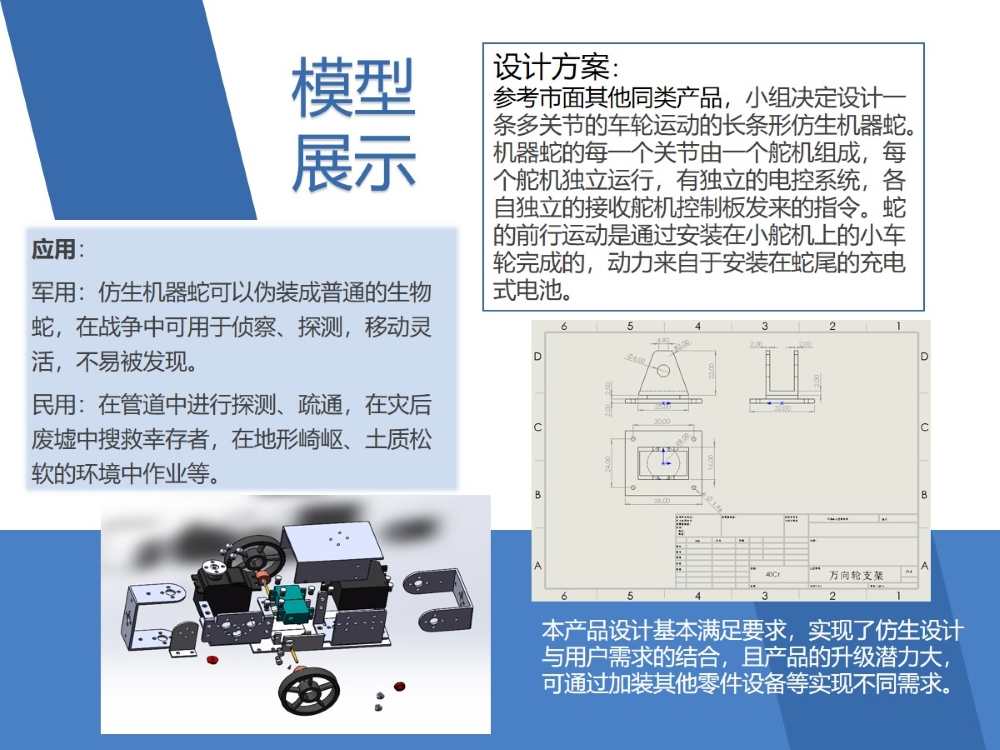
我们选择设计仿生蛇重点在于能够实现蛇的灵活性和适应相当多种类的地形,可以让人们更轻松探寻人难以到达的地方。同时,我们预想最终的产品规格将相当于一条真正的蛇,以便能同蛇一般灵活完成各种任务。为此,我们首选设计方案如下:机械蛇整体由多个模块组成,每个模块底部装有小轮。利用躯干上的每个单节的相互转动,使得整体按一定的曲线发生弯曲变化,产生向前的驱动力,使得整体在地面上滑行。运动速度快,设计难度相对较小。
我们完成了机械蛇的调研、设计与开发。设计发放了产品调查问卷,明确了用户需求,构造了产品质量屋模型;根据用户需求,设计了产品机械蛇将通过每一单节的相互转动,达到整体如蛇一般蜿蜒前行,并对单节具体构造零件进行了工程制图和三维建模;设计将单节模型连接,在Solidworks中进行仿真,成功模拟出蛇的运动姿态,实现蛇的灵活性;学习了运动控制程序的构思,但由于疫情原因,未能完成后续实际产品的制造。
