

本项目目标设计一种可以在墙面(主要针对玻璃面)爬行的机器人代替人工进行墙面清洁,从而避免高墙清洁带来的安全风险。机器人大体分为三个部分:吸附、运动、清洁,其中吸附结构由真空泵和胶吸盘组成,通过胶管将真空泵和吸盘连接在一起并通过控制真空泵实现吸附与移动;运动结构由两个舵机三个部分组成,通过特定的运动模式实现移动;清洁结构大致有两种方案,因为运动过程中机身会上下起伏为了保持清洁布始终贴在墙面上就需要时刻调整清洁布的高度,设想可以通过伸缩或者杆控来实现。
1.实现稳定的吸附,可以控制真空泵开关并配合腿部运动从而实现在墙面上移动;
2.清洁布可以随着机身上下而调整高度,时刻保持贴合墙面而实现清洁;
3.替代人工自动安全地完成清洁工作;
4.预计体积在0.3m*0.3m*0.3m左右;
5.成本方面和人工相比有明显优势,具有较强市场竞争力。
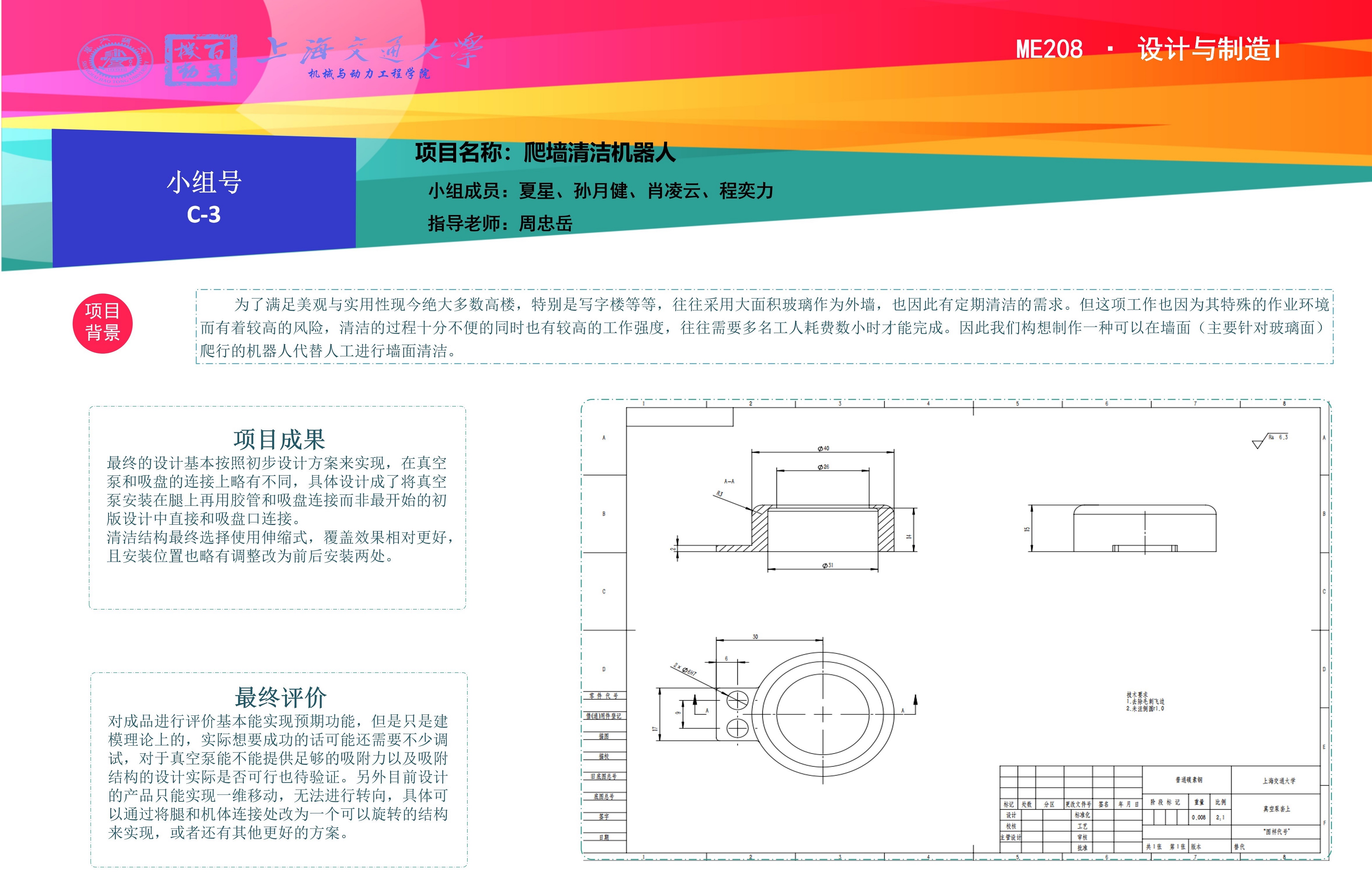
最终的设计基本按照初步设计方案来实现,在真空泵和吸盘的连接上略有不同,具体设计成了将真空泵安装在腿上再用胶管和吸盘连接而非最开始的初版设计中直接和吸盘口连接。
清洁结构最终选择使用伸缩式,覆盖效果相对更好,且安装位置也略有调整改为前后安装两处。
对成品进行评价基本能实现预期功能,但是只是建模理论上的,实际想要成功的话可能还需要不少调试,对于真空泵能不能提供足够的吸附力以及吸附结构的设计实际是否可行也待验证。另外目前设计的产品只能实现一维移动,无法进行转向,具体可以通过将腿和机体连接处改为一个可以旋转的结构来实现,或者还有其他更好的方案。
