
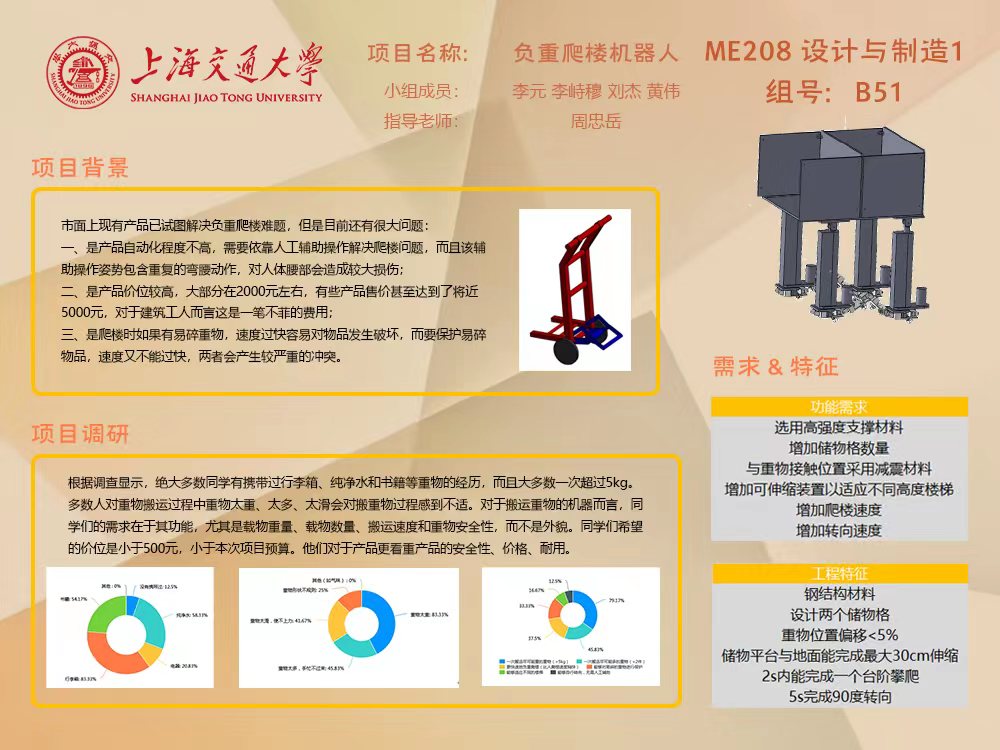
随着城市化进程的不断推进,人们在享受高楼提供的土地利用率提升的同时,也受到了爬楼等生活问题的困扰。负重爬楼难题不仅仅困扰人们的生活,更有一部分人由于职业因素长期负重爬楼,患上了职业性肌肉骨骼疾患。现行负重爬楼解决方案总具有价格昂贵、自动化程度不高等问题。本项目初步实现了负重机器人,使用高强度材料以增加支撑强度,减少运动环节以实现快速爬楼,设计承重储物格满足需求,挡板限位限制重物位置,伸缩电液推杆固定储物平台倾角。
项目的设计目标是设计一款负重爬楼机器人,它能够满足以下需求:选用高强度材料做支撑,储物能力强,与重物接触位置采用减震材料,具有可伸缩装置以适应不同高度楼梯,转向爬楼速度,转向速度快。为此它应该满足以下工程特征:采用钢结构材料,具有两个储物格,重物位置偏移<5%,储物平台与地面能完成最大30cm伸缩,2s内完成一格台阶攀爬,5s完成90度转向。同时在设计的过程中应该考虑如何使用型材进行批量化生产,考虑各零部件配合问题。
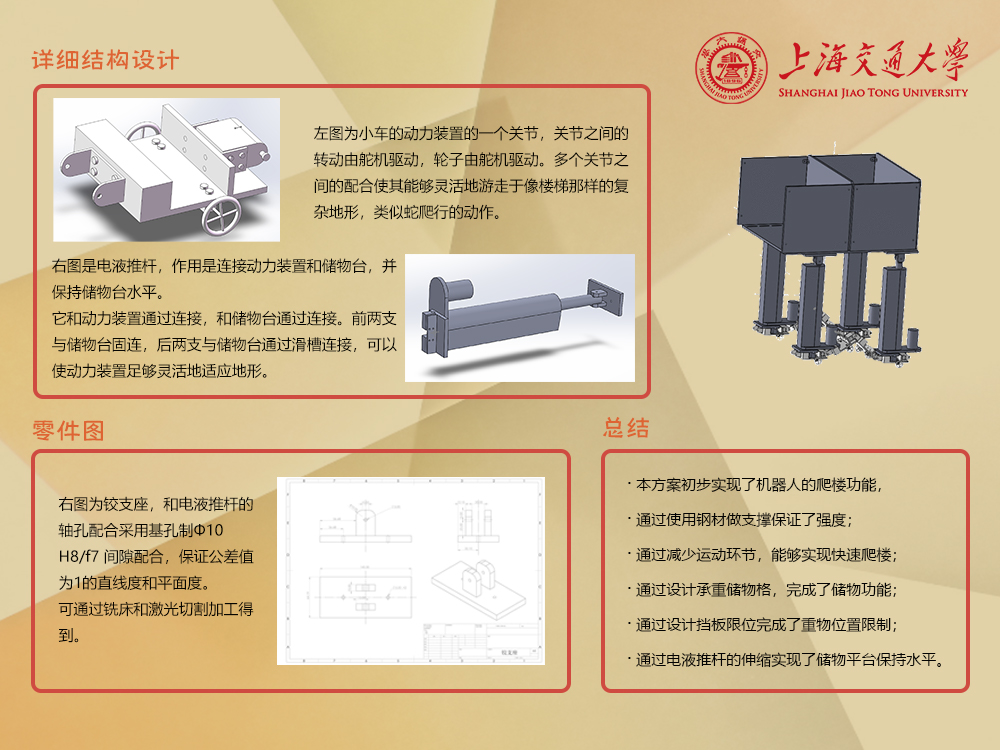
本项目初步实现了机器人的爬楼功能,通过使用钢材做支撑保证了强度;通过减少运动环节,能够实现快速爬楼;通过设计承重储物格,完成了储物功能;通过设计挡板限位完成了重物位置限制;通过电液推杆的伸缩实现了储物平台相对于平面的倾角固定。对于项目的不足之处,可以通过在底部轮式结构增加配重以降低重心,增加蛇形机构关节以跨越高台阶,通过填塞海绵等减震材料,限制重物的运动。
