
随着人类对在复杂环境中既具备高移动能力,又具备可靠性的移动平台日益迫切的需求,步行机器人具有非常广阔的应用前景。而在众多步行机器人中,模仿昆虫结构和运动控制策略的六足机器人具有很强的代表性。
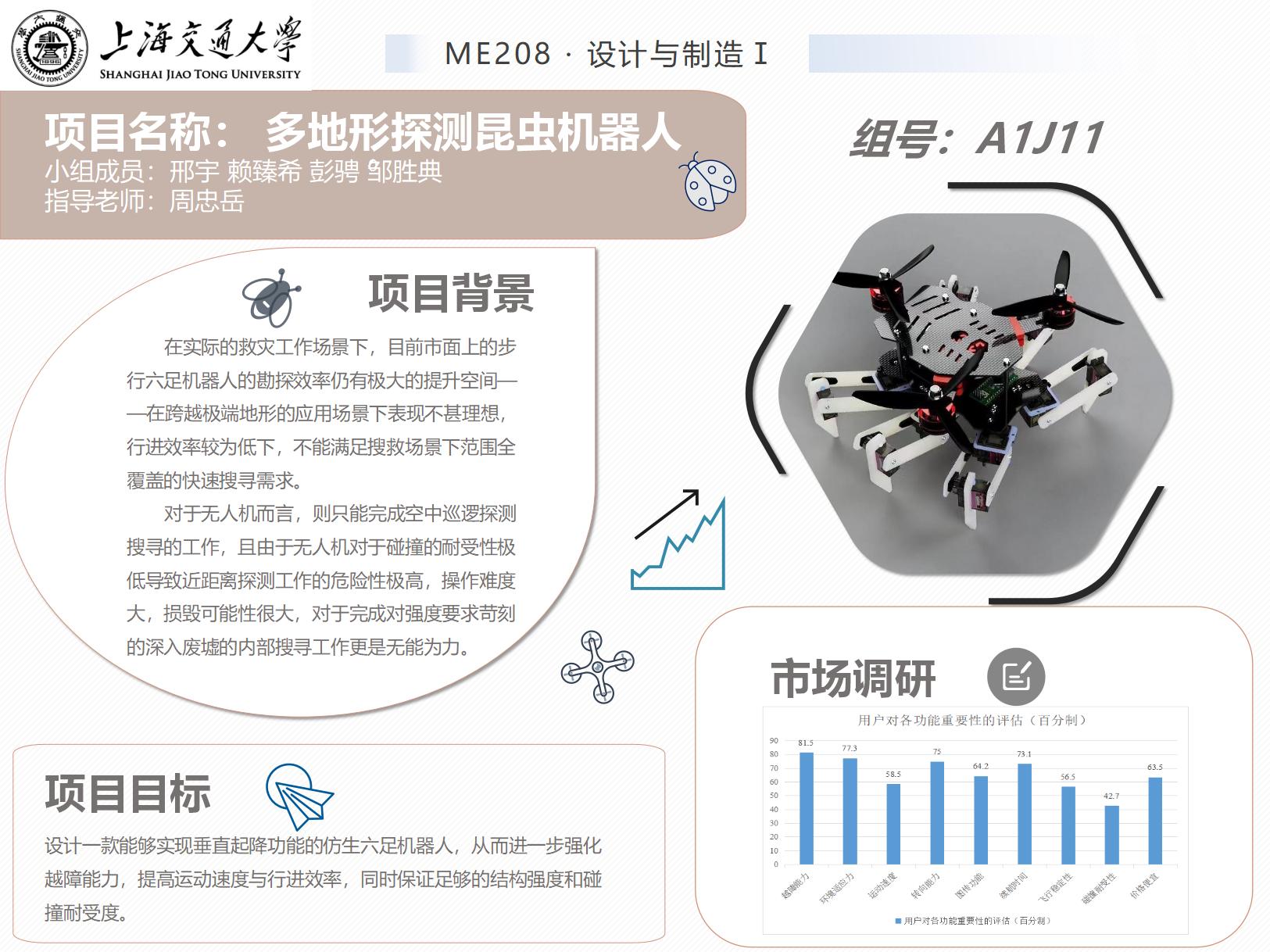
六足机器人具有控制结构相对简单、行走平稳等特点,故而可适应于复杂地形,多用于救灾场景、军事勘察等领域,但其仍有极大的提升空间——面临在跨越极端地形的应用场景下表现不甚理想,行进效率较为低下等种种问题。
于是,我们拟设计一款能够实现垂直起降功能的仿生六足机器人,其具有强化的越障能力,提高运动速度与行进效率,同时也能保证足够的结构强度和碰撞耐受度。
我们拟设计的仿生六足机器人主要需要完成以下目标:
1、在六足的设计上模仿仿生蜘蛛等多足爬行动物的腿部结构,模拟蜘蛛的运动步态特点,可以提高运动的灵活度和转向能力,适应崎岖、复杂的地形。
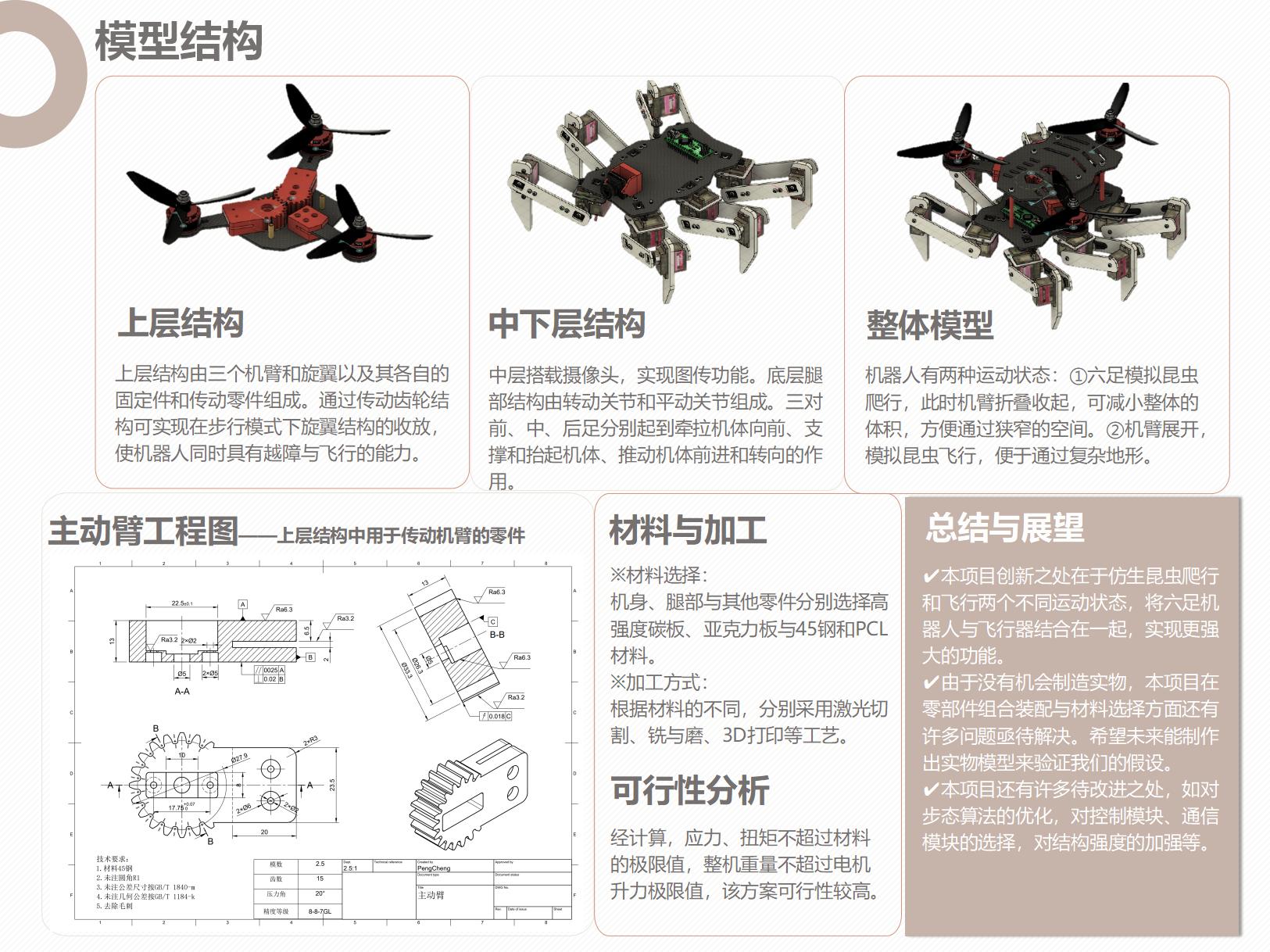
2、借鉴旋翼无人机的设计,计划在六足机器人上增加可折叠的三个旋翼,可以大大提高机器人对不同地形的适应性
3、在实际场景的应用上,可以做到:在普通地形运动时,旋翼机臂可以收起,不影响正常前进;当通过复杂地形时,若仅靠机械腿运动难以通过,则可打开机臂利用旋翼飞行通过。
目前来看,最终的设计产品基本实现了设计之初的目标。
机器人下部的六足运动结构设计为:两对前足拉动虫体向前,两对中足用来支持并举起所属一侧的身体,后足推动虫体前进,同时使虫体转向,这样的设计使得重心永远在三角支架内,使昆虫可以随时停在原地。
同时设计的三旋翼的可折叠机体结构——通过传动齿轮结构以及可折叠机翼实现在步行模式下旋翼结构的收起,这种随放随收的设计,使得机体更加灵活,也能适用于更多更复杂的场景。
