

随着陆地资源日益枯竭,人们把目光投向了拥有丰富资源和巨大开发价值的水下世界。本项目旨在针对受污染水域或者未知水域设计一款水质监测仿生鱼,实现水样采取、水质监测等功能,利用鱼类的游动具有推进效率高、机动性能好等优点来适应该领域复杂水下作业任务的需求。
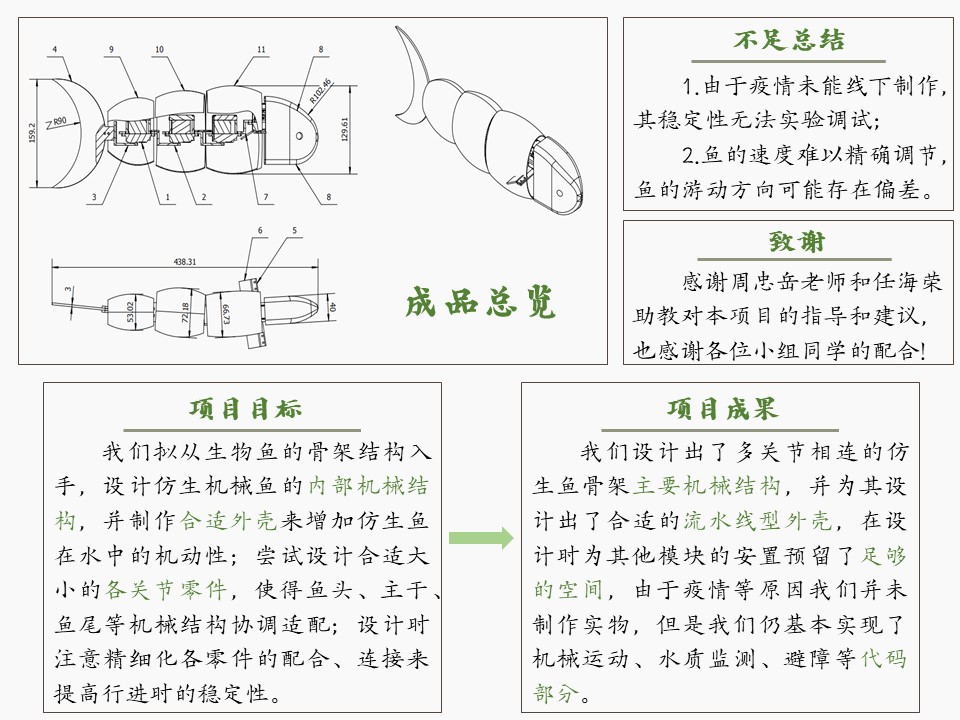
我们拟从生物鱼的骨架结构入手,设计仿生机械鱼的内部机械结构,并制作合适外壳来增加仿生鱼在水中的机动性;尝试设计合适大小的各关节零件,使得鱼头、主干、鱼尾等机械结构协调适配;设计时注意精细化各零件的配合、连接来提高行进时的稳定性;通过安置水质监测、GPS、摄像头等模块来丰富产品功能;利用计算机视觉实现避障、路线导引功能。
我们设计出了多关节相连的仿生鱼骨架主要机械结构,并为其设计出了合适的流水线型外壳,在设计时为其他模块的安置预留了足够的空间,由于疫情等原因我们并未制作实物,但是我们仍基本实现了机械运动、水质监测、避障等代码部分。
