

大自然中种类繁多的昆虫,体积小巧且灵活,能够自如穿行于丛林之间,对于设计复杂地形下应用的机器人很有借鉴价值。本项目拟仿照大自然中昆虫的行走姿态,研究设计制造一款六足仿生机器人,并实现自动测距避障、行走,以及手动控制功能,应用在复杂的环境中,服务于多种使用场景。
对几种六足动物(如蚱蜢、蟋蟀)的步态进行研究,提取共同特点,研究设计制造一款多功能、高自由度的六足机器人,灵活度高,既可以作为娱乐玩具,亦可搭载检测设备,作为救援搜索机器人。通过编程,使用者能够对其进行红外遥控,同时机器人自身具备避障能力。在自然界和人类社会中存在一些人类无法到达的地方和可能危及人类生命的特殊场合,如防灾救援和反恐斗争。本项目旨在对这些危险环境进行不断探索与研究,寻求一条解决问题的可行途径。
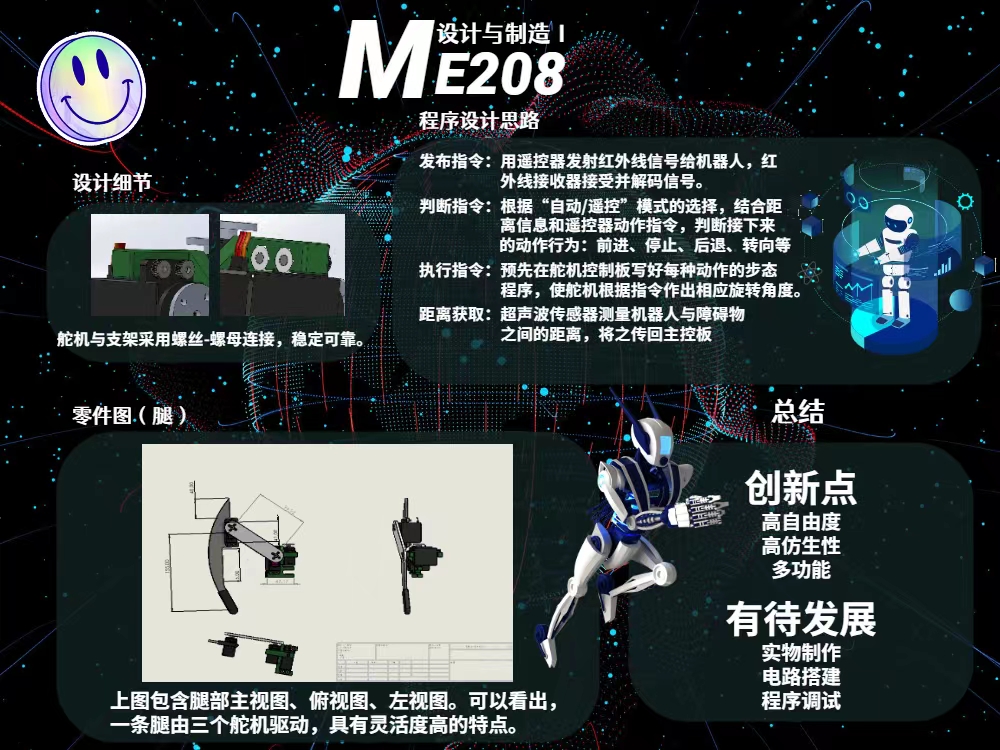
(1)完成了仿生六足机器人的3D建模,并给出了零件图;
(2)完成了PCB板的设计,以Arduino Nano板为核心控制元件,利用32路舵机控制板实现对3×6个舵机的配套控制,每只机械足能够以三个自由度灵活运动;
(3)制作动画模拟了六足机器人的运动,能够模仿昆虫的步态;
(4)商定程序设计思路:由红外遥控器发送指令给机器人,机器人根据模式选择结合距离信息判断接下来的行为,并由舵机控制板和舵机执行指令,再次测量与障碍物之间的距离,不断循环;
(5)由于本学期条件所限,后续实物制作以及电路、程序的实现将由本小组在大创中完成。
