
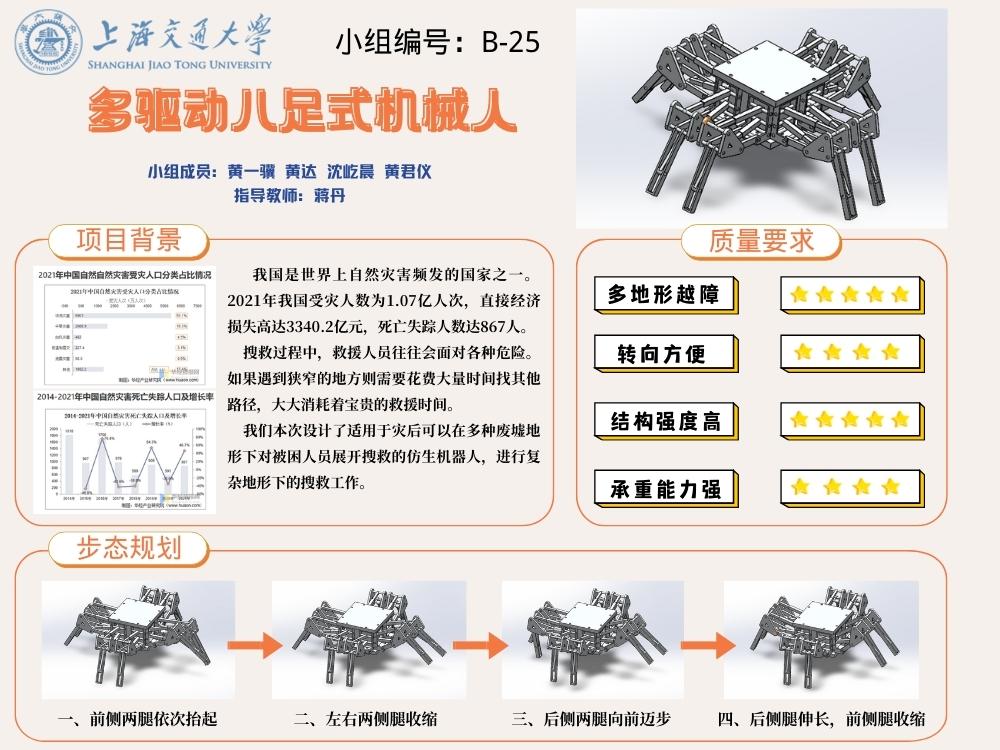
本项目针对我国自然灾害频发、搜救人员进入废墟搜救困难、容易耽误宝贵救援时间这一问题,从仿生学角度入手,选取蜘蛛为仿生对象,通过对蜘蛛独特的身体结构和在复杂环境下爬行机理的研究与分析,研发出来的机械人主要应对非结构化环境下复杂的地形状况,其主要任务是实现机械人在诸如废墟、野外等人员难以进入或无法正常工作的环境中实施清除障碍、抢救受困人员以及携带特定装备进行维修、探测等。
本项目的主要目标首先是设计出合理的多驱动八足式机器人结构,然后通过对蜘蛛步态的分析实现多驱动八足式机器人的步态模拟并进行优化。通过前两步理论分析再进行测试实现多驱动八足式机器人的平地平稳行进和转向,在实现多驱动八足式机器人的越障步态研究并进行测试,最后对上述测试所采集到的载荷数据进行静力学分析进行结构优化减重。后续目标包括搭载太阳能电池平台、gps定位系统、实现多种方式遥控防止断连等。
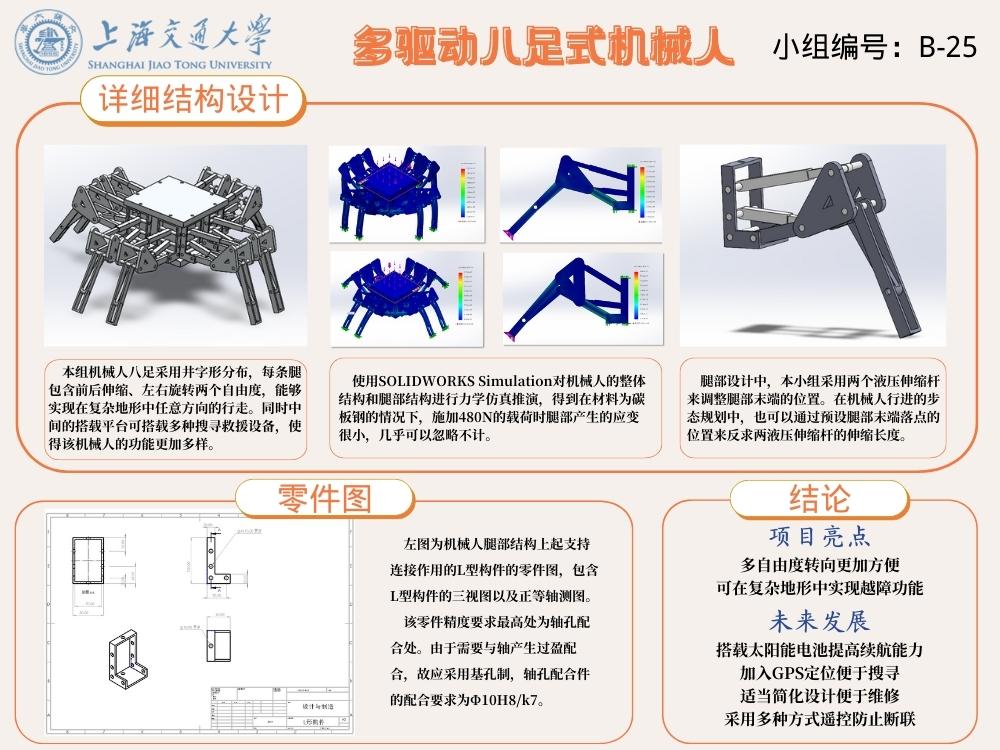
本项目针对稳定性、通过00等等能力CA提出具有可行性、准确的EC,确立了设计目标;小组成员均独立设计草图并进行交流,通过比对各自方案优缺点,得出现有设计方案;使用SOLIDWORKS2021软件进行多驱动八足式机器人的建模,随后使用软件自带功能进行步态模拟优化,实现了多驱动八足式机器人的平地单循环前进步态模拟,对其进行静应力分析进行强度校核,并针对机器人结构特点提出制造加工要求,最终完成多驱动八足式机器人的仿真环节。
