
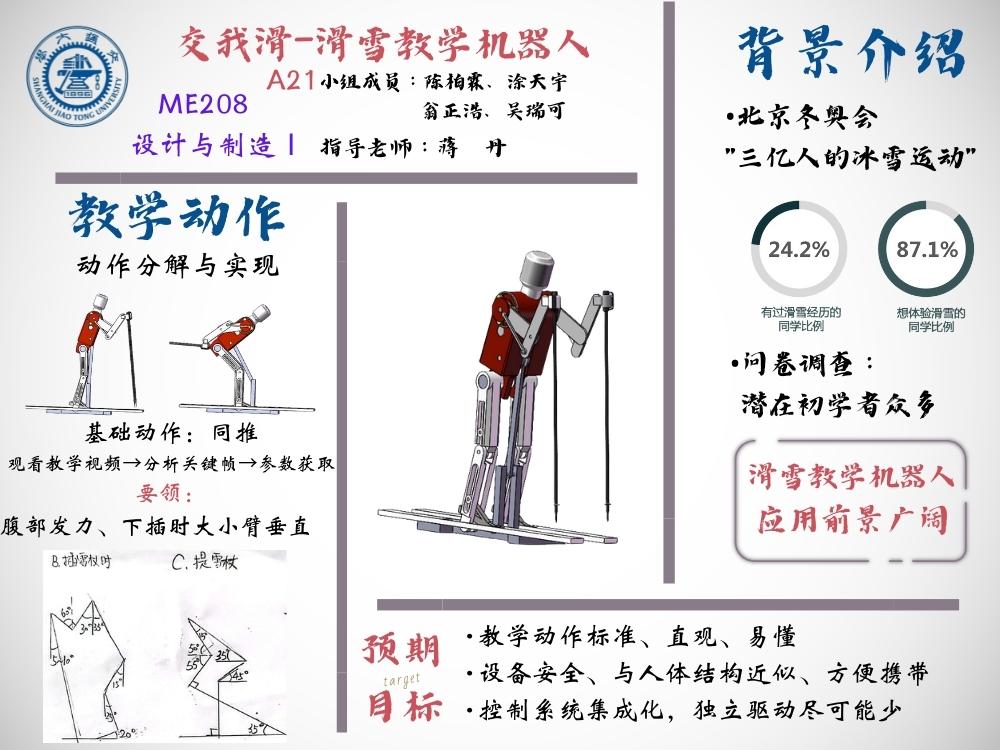
越野滑雪是一项极具魅力的体育活动。在北京冬奥会的推动作用下,我国冰雪运动参与人数迅速增加,各地雪场出现了越来越多的滑雪初学者。然而,当前我国滑雪教学资源相对不足,需要有更好的工具来辅助教学。从雪场经营者的角度,若能为初学者提供便捷有效的滑雪技能学习渠道,有利于其吸引更多的顾客。因此,本项目拟设计一款仿生滑雪机器人,能够向初学者示范规范的滑雪技术动作,实现对普通参与者的初步教学,增添滑雪的趣味性。
1. 教学动作的难度适中,适合绝大多数初学者学习。
2. 能够精确模拟越野滑雪的技术动作,尽可能多地呈现动作的细节和要点,丰富教学内容,提高教学效果。
3. 在保证动作精度的前提下降低机器人的控制难度,保证动作教学的直观性,也便于施教者使用。
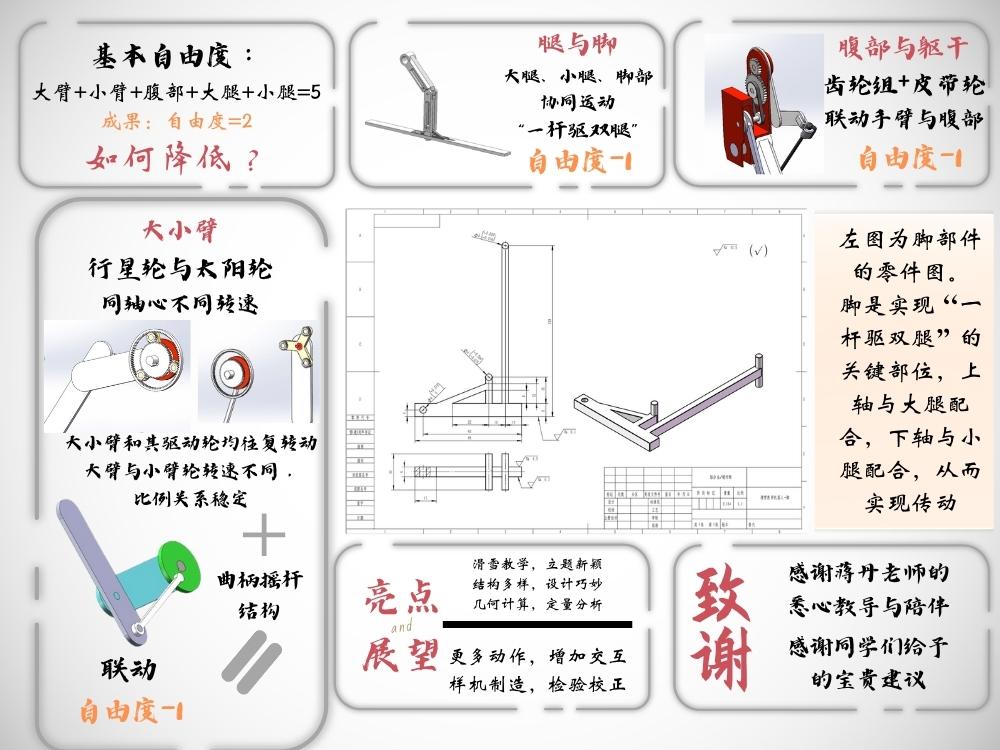
以越野滑雪中的“同推”作为教学动作,难度适中,适用人群范围广。基于定量的动作分析,设计了手臂,腿部,腹部等一系列机械结构,精确模拟了该技术动作中手臂摆动,手脚协同,腹部发力等细节要点,动作具有较好的规范性。利用行星轮等机械结构的运动特性减小自由度,在保证动作精度的前提下降低了控制难度,提高了机器人的可靠性。
