
本次项目名为“仿生独角兽”,围绕仿生的主题,从四足动物的奔跑姿态入手,选择了马这一动物为主体进行仿生。然而,马的奔跑姿态太过单调,因此加入了独角和翅膀,翅膀扇动方向可以在向前和向下两个方向之间进行小角度的微调。通过齿轮,连杆等装置,展现出奔跑,展翅,头部,尾部活灵活现的运动,展示仿生机械的美感。
本项目的主要目标是将仿生独角兽做成一个逼真的工艺品,好看,好玩。要达成目标的前提就是独角兽的各种运动都要逼真,活灵活现。主要目标包括了四个目标,翅膀的灵活扇动,腿部的奔跑姿态逼真,头部符合动力学原理的运动,尾部进行微小幅度摆动。腿部逼真奔跑的目标中更包含了两个小目标,第一是要将腿部各部件形态做成逼真的马腿肌肉块的形态而不能以方形敷衍,第二是各肌肉块之间的活动要紧密配合。
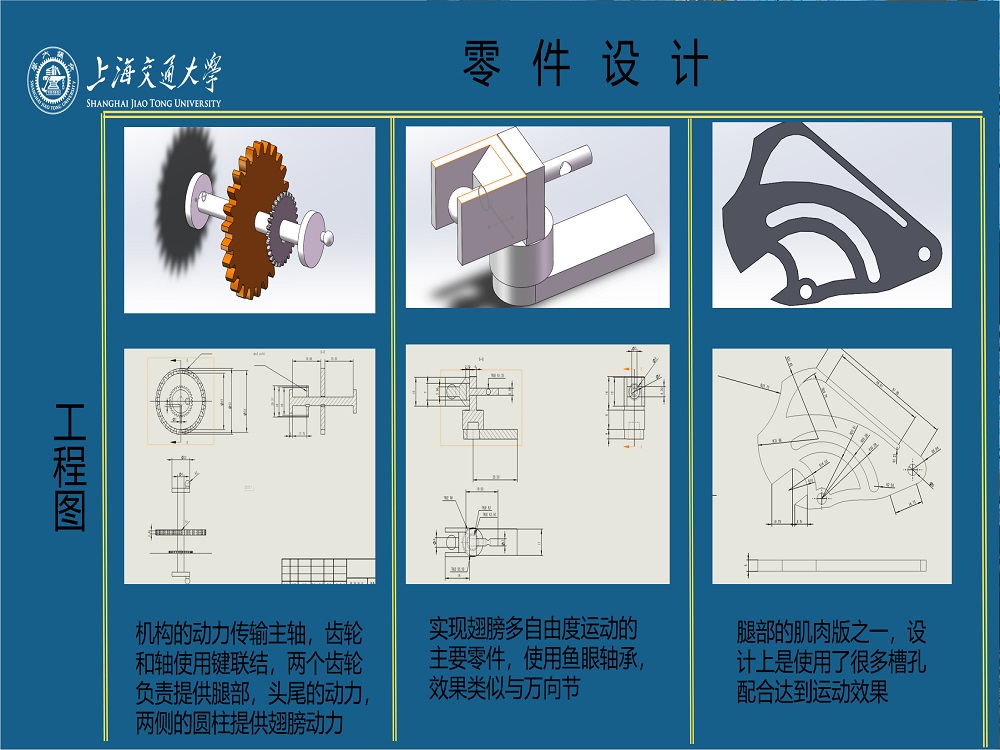
本次项目成果丰硕,达成主要目标,完成了工艺品底座的设计,独角兽本体也达成了四部分的运动要求。其中,以翅膀和腿部完成效果最好,腿部肌肉块轮廓分明,既体现了机械之美,也有仿生生物本身的美感,腿部运动时各部件配合紧密,伸腿收腿时甚至能完美与大腿肌肉板上的凹槽契合。翅膀通过鱼眼轴承的配合,实现了小角度范围内的可微调扇动,使得翅膀运动更加活灵活现。
