
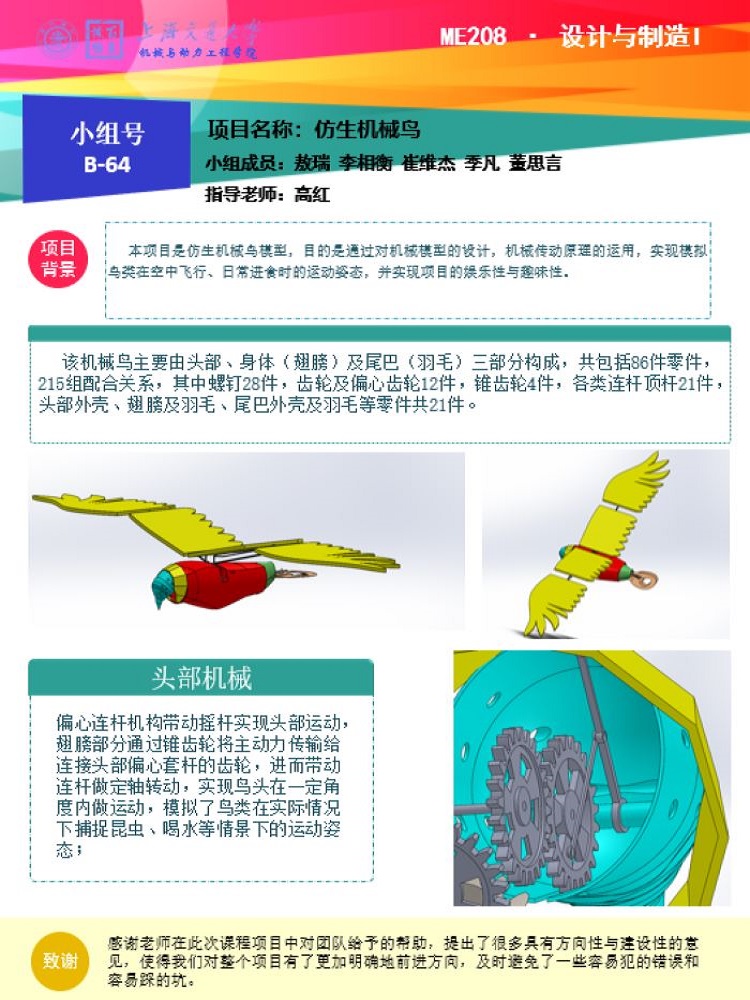
本项目是仿生机械鸟模型,目的是通过对机械模型的设计,机械传动原理的运用,实现模拟鸟类在空中飞行、日常进食时的运动姿态,并实现项目的娱乐性与趣味性。
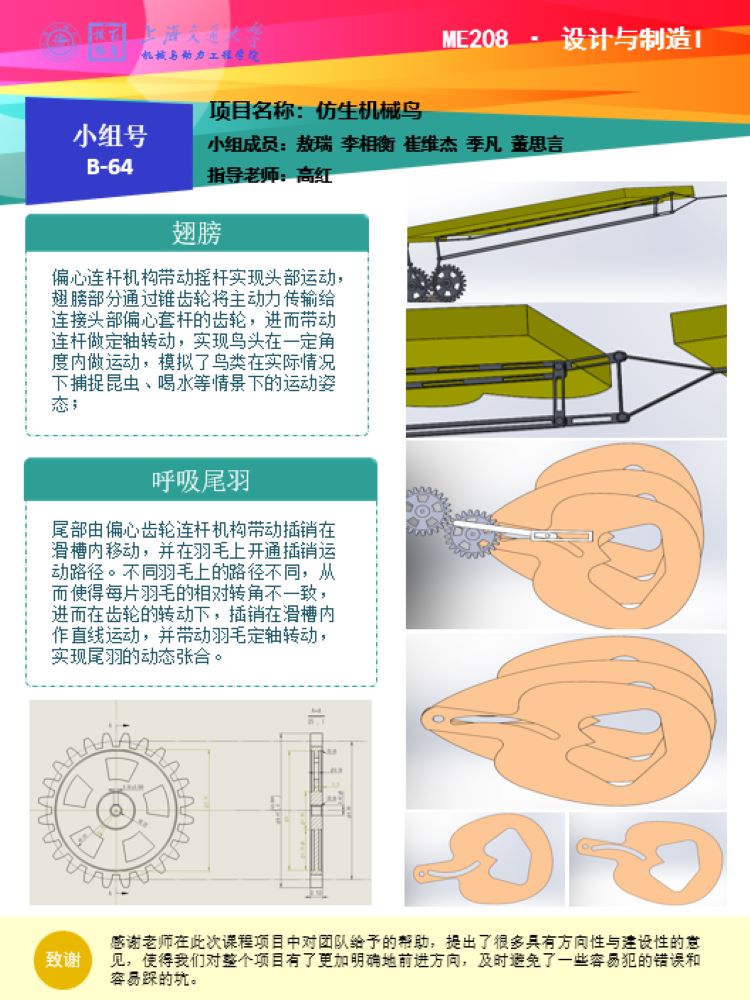
该项目头部使用偏心连杆机构带动摇杆实现头部运动;内部翅膀部分机械使用曲柄摇杆机构及平行摇杆机构,由曲柄摇杆机构带动三角形固定杆与下部顶杆推动平行四杆机构做摆动;尾部由偏心齿轮连杆机构带动插销在滑槽内移动,并在羽毛上开通插销运动路径,从而实现尾羽的动态张合。
该项目预期目标为:
1、 实现机械鸟模拟实际鸟类飞行时翅膀的运动姿态;
2、实现机械鸟头部在竖直平面内的运动,模拟实际鸟类在捕捉昆虫、喝水等情景下的运动姿态;
3、实现机械鸟翅膀关节的运动,模拟实际鸟类在飞行时曲翅与张翅的运动;
4、内部通过锥齿轮与连轴实现机械动力在不同平面内的传输;
5、尾部通过小型连杆机构实现尾巴羽毛的动态张合,模拟呼吸尾羽形态;
6、通过分析材料性能、零件实际载荷与承受弯矩,设计零件尺寸,修改零件工艺。
1、整体上实现了机械鸟含有两个自由度、一处关节的翅膀的运动;
2、实现了具有机械美感的鸟头的绘制,模拟实际鸟类在点头时所具有的30°-45°范围内的活动姿态;
3、实现了内部机械动力由x方向朝y方向及z方向的转变;
4、根据零部件实际结构、用途及目标性能改进产品工艺,打造了具有镂空美感、倒角设计、凹凸轮廓等高性能的齿轮及连杆;
5、实现了尾羽在齿轮及连杆共同控制下的动态张合,模拟鸟类生物的羽毛特性,打造呼吸尾羽形态;
6、实现了尾巴羽毛的降阻功能特性,使飞行动力更加充足。
小组成员利用建模软件进行建模、渲染、爆炸、动画导出等操作,得出了较为理想的模型,达到了预期的目标,实现了项目的娱乐性与趣味性。
