
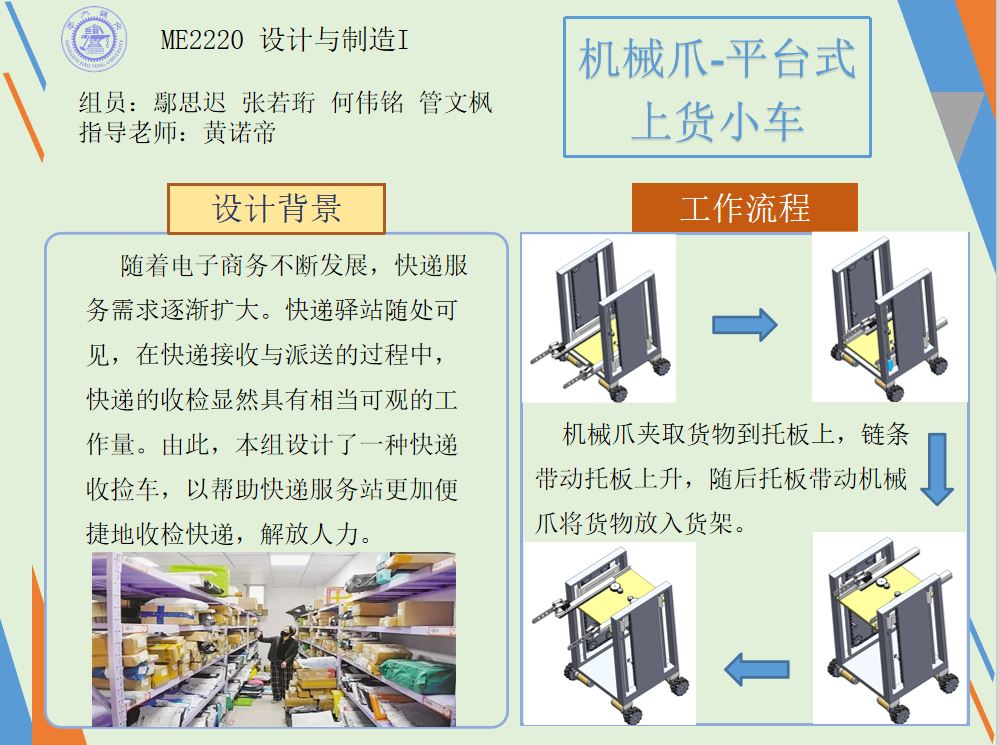
快递服务的需求日渐扩大,快递量增加对快递收取和分类上架带来了不少挑战,如何更快速的将快递传达成为一个问题。对于体量较大的快递收捡站,一般通过大型设备以流水线的方式收捡快递;而对于体量较小的快递收捡站,一般是通过人力实现快递分拣与搬运。市面上的货运机器人大多采用机械爪、吸盘等方式抓取,通过机械臂移动到货架上,其结构较为复杂,控制需求精度较高,自由度较为冗余。由此,本组设计了一种快递收捡车,以帮助快递服务站更加便捷地收检快递,解放人力。
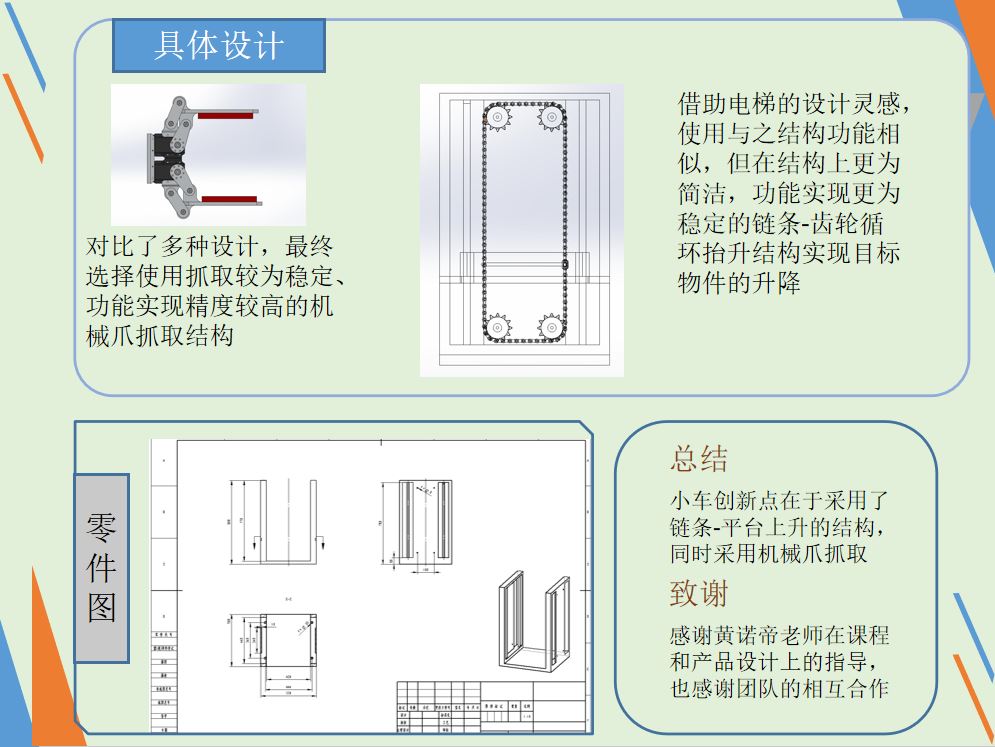
我们希望设计一款能够自动上货的快递小车,帮助人们快速而省力地将送来的快递传达到指定的货架上。应用场景主要为货流量大的快递驿站,初始设置背景为学校驿站。当快递集中送达时,快递小车能够快速识别快递并送达指定货架,从而使学生能第一时间收到快递。我们的注意力主要集中在小车将货物从地上送达货架的过程,使用可靠的货物抓取装置;为了简便和快速,采用平台式上升方式,设计更加简单且易于维修;通过链条带动平台运动,插孔设计使得链条只需要单向运动,简化了动力装置。
我们完成了小车的基本架构,做出了其3D模型。抓取装置采用机械爪,爪子平行特性能够适应各种大小的快递。机械爪伸缩由杆件连通齿轮带动,实现机械爪的进出。平台为一块和链条相连的托板,连接处为一条槽,当链条运动时,卡扣会带动平台上升;到指定高度时停下,机械爪将货物夹出;之后链条继续运动,平台到最高点时,卡扣开始沿着槽运动,运动到另一边后带动平台下降,完成一次任务,期间链条单向运动,利于控制系统简化。
