
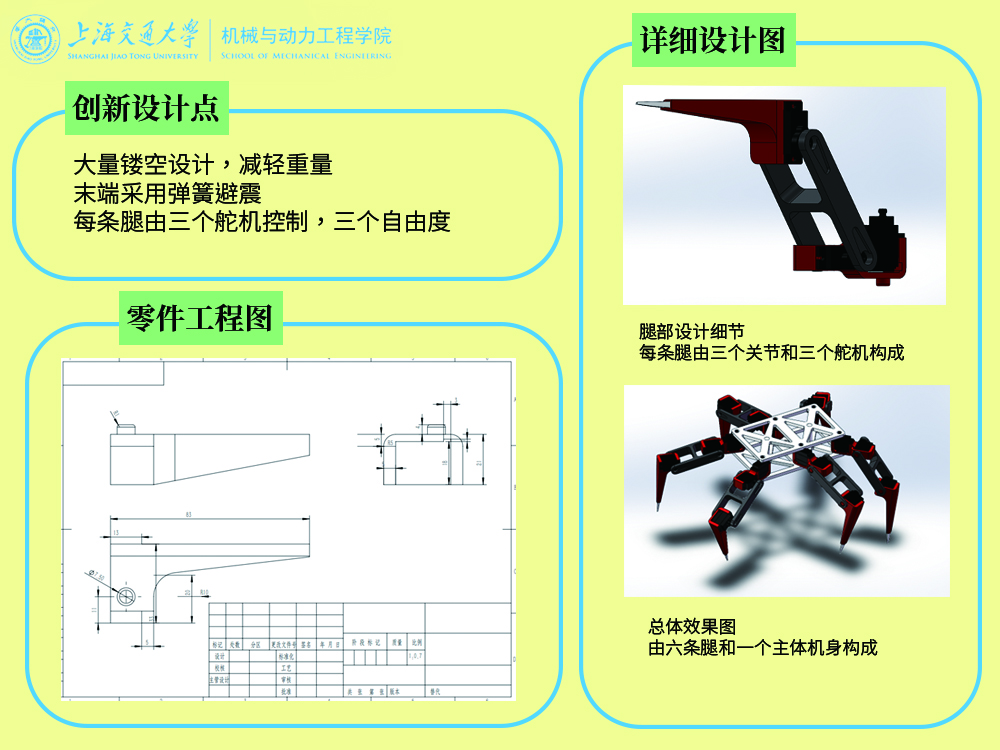
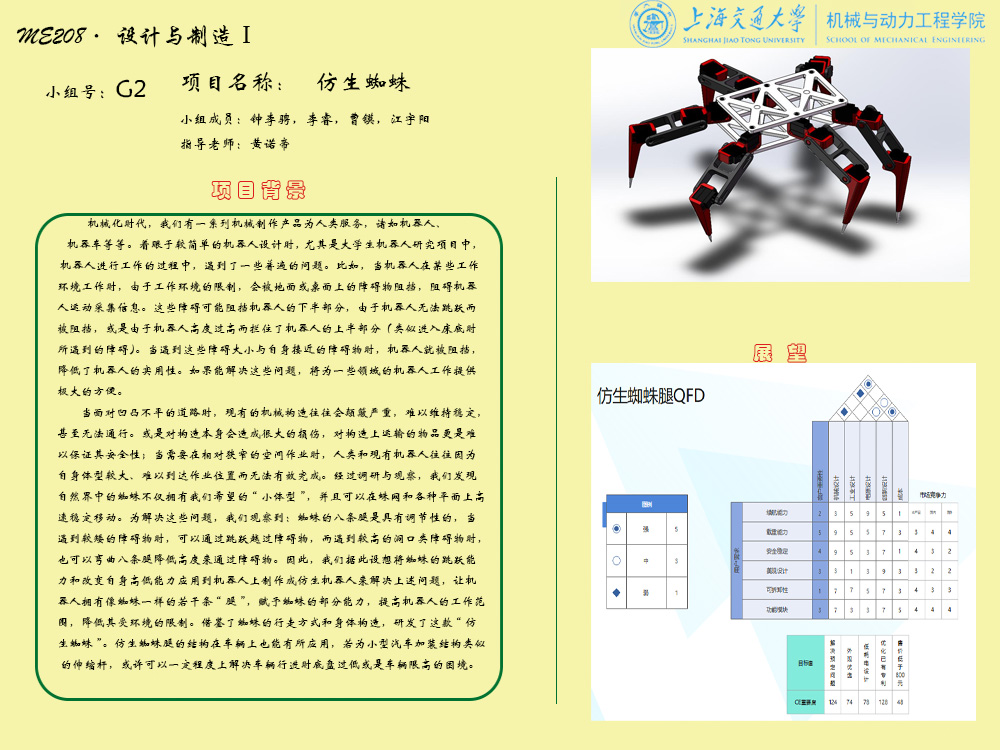
受到仿生设计理念的启发,我们设想将蜘蛛的跳跃能力和高低能力应用到机器人上制作成仿 生机器人来解决工程上机器人跨越障碍物的问题,提高机器人的工作范围,降低其受环境的限制。我们选用机电结合的驱动方式,依靠齿轮等传动结构仿生了六条由一个关节扭合成的蜘蛛腿结构,并在蜘蛛腿末端创新性地加入内置弹簧结构,使机器人具有一定弹跳能力,扩大机器人的伸缩范围和克服障碍能力。
依据蜘蛛的运动情况,制造出体型较小、六只脚可以协调运动的仿生蜘蛛机器人,可以完成基本的向各个方向爬行动作,并对各种路面情况表现出较好的适应力,可以跨越部分小型障碍物、可以爬上一定角度的斜坡、可以在低矮环境中自由运动。有贴近地面高速移动的能力,并保持自身的稳定性。同时,兼顾经济性,对材料的选用和零件加工控制在简单易操作的范围之内。
基本完成了对放生蜘蛛机器人机械结构的设计,并在参考已有机器人的设计经验的基础上很好的融入了我们的创新点。设计出的蜘蛛腿不仅结构稳定、活动范围大,并且拥有一定弹跳能力。同时我们完成了对仿生蜘蛛机器人运动的理论分析和三维建模,并对其运动情况进行了探讨和模拟。在三维模拟过程中机器人配合良好,基本可以实现协调运动的目标。
