
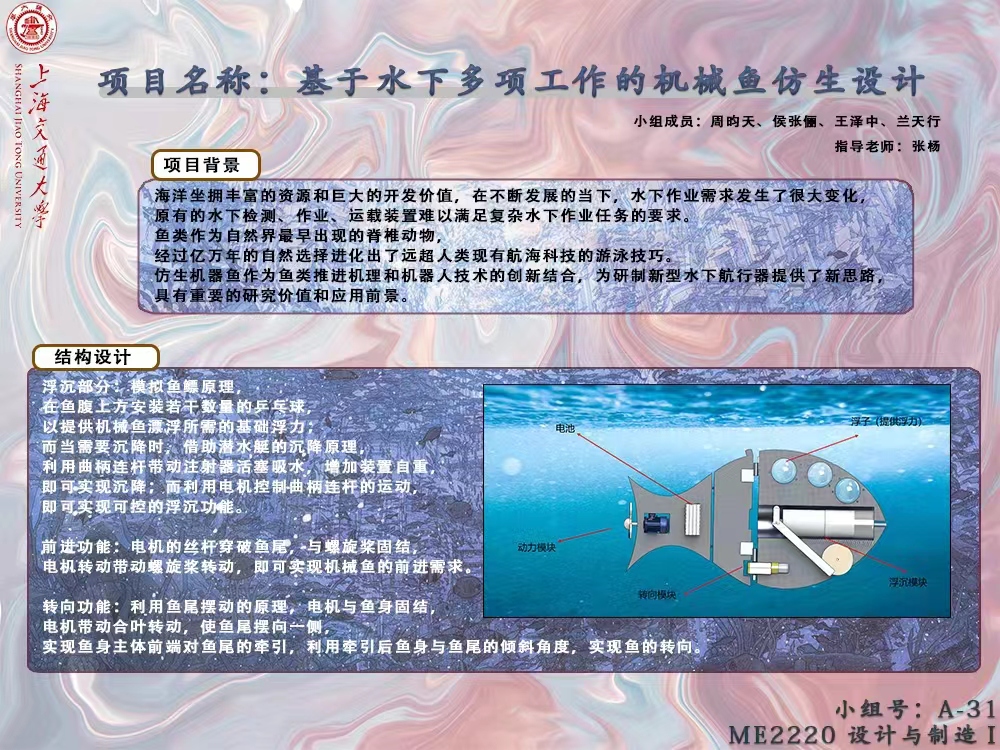
我们小组的项目是基于水下多项工作的机械鱼仿生设计。机械鱼主体由木板和亚克力板组成;利用乒乓球等轻质浮子材料为机械鱼提供浮力,实现漂浮功能;模拟潜艇原理,利用特制曲柄连杆带动注射器推拉实现机械鱼的浮沉功能,利用数节电机驱动合页、助推器控制机械鱼的转向、摇摆、前进等运动,初步实现手动遥控机械鱼在水中的各项运动,并计划实现机械鱼在水中的自动游行,还可通过搭载水下地质探测、水质检测等模块实现水下多项工作。
初步目标是通过连杆带动注射器改变机器鱼重量实现机械鱼的浮沉功能、电机通过金属合页控制鱼尾摆动实现转向功能、以助推器辅助摆动实现前进的功能。进一步目标是通过算法控制实现远程姿态与速度控制、在波浪水况中自动摇摆保持姿态,利用智能识别模块实现对水下目标的具体识别,利用机械模块实现对水下物体的抓取,同时通过挂载测量装置实现对水质的监控。未来可以应用于矿井救援,水下救援,水质检测,资源勘探等多个重难点领域。
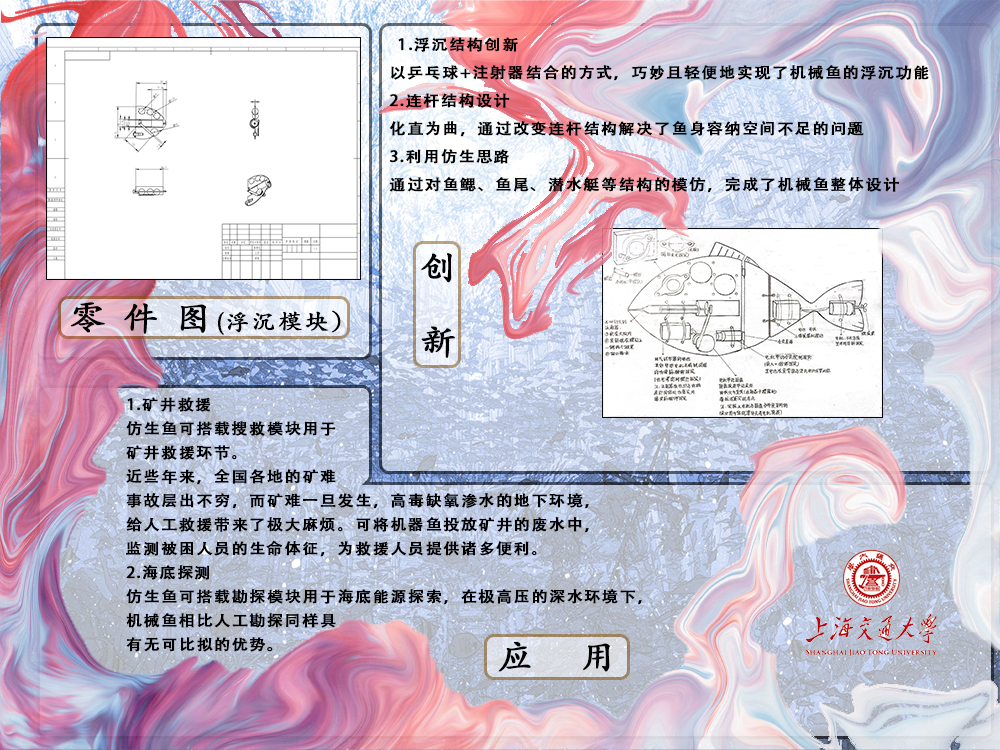
进行了市场需求调研与分析,制作了质量屋来评价各需求的重要性。从仿生角度出发,以鱼尾摆动前进、调整空腔实现浮沉为基本思路,实现水下多种功能为目标,设计拥有沉浮、转向、前进等功能的机械鱼。在设计过程中,团队分工明确、定期讨论推进项目进度,在老师和助教的指导下绘制了多版示意图、草图,以机械仿真方式再现了鱼的游动,形成了可用于实际制造的项目零件图。小组参加了“砺新杯”大学生机械工程创新大赛,获得校二等奖。
