
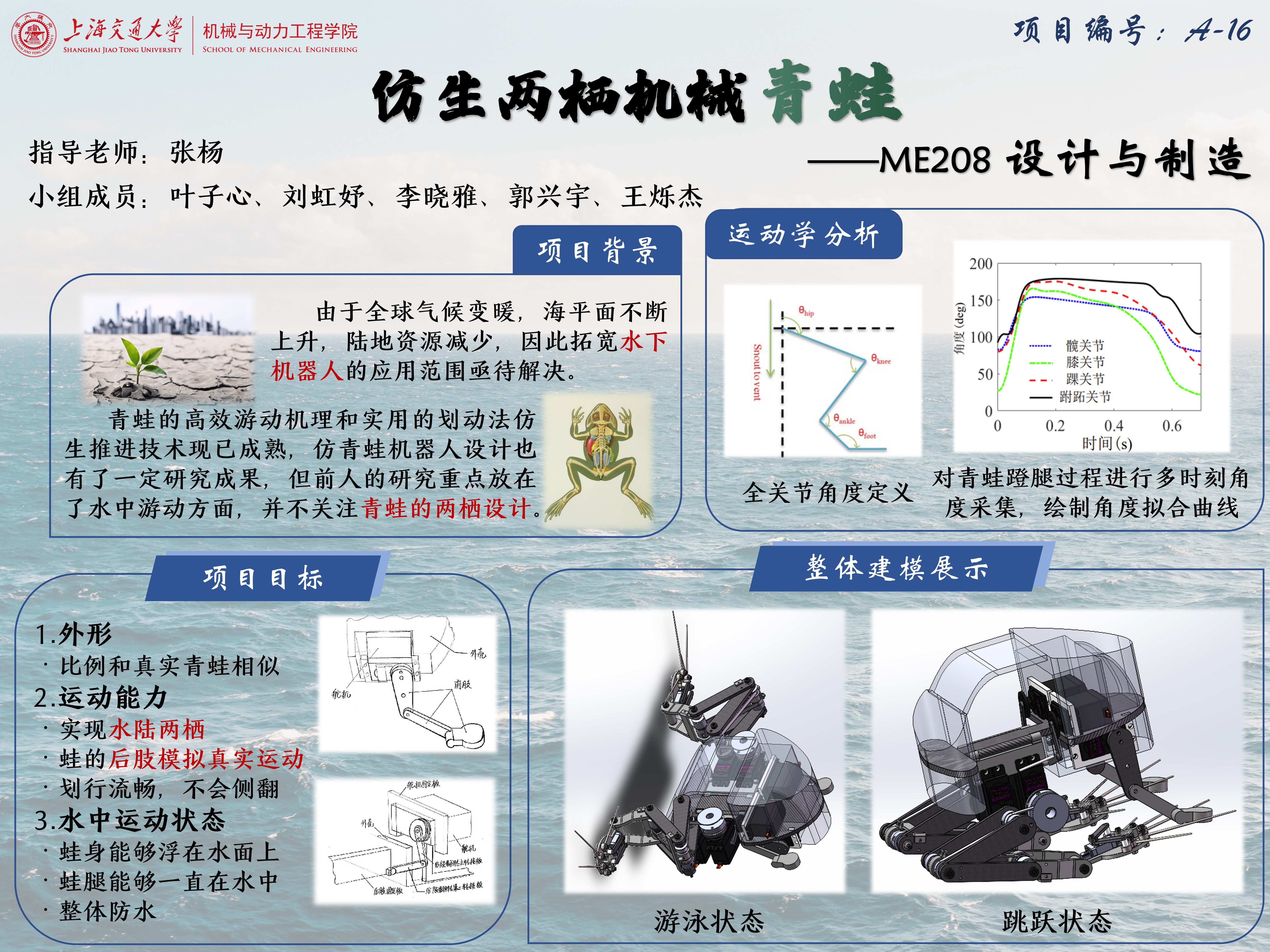
随着陆地资源的减少并趋于枯竭,人类对海洋资源的探索和利用逐渐增多,水下仿生机器人对应对不同水下环境和任务要求,更好的探索海洋有重要价值。目前国内所设计的仿生青蛙大多采用气动肌肉驱动,而气动肌肉结构复杂,成本高,不利于大范围推广。与此同时,目前国内仿生青蛙更多的只针对青蛙的滑行进行模拟,两栖功能较差。我们设想开发一个结构简单、成本小、有推广应用价值,并且能较好实现两栖功能的仿生青蛙。
我们希望设计一个可以实现两栖功能的仿生机械青蛙,采用机电一体化的设计,通过舵机驱动,利用简单高效的机械结构进行传动。我们还希望实现仿生青蛙结构的模块化设计,最大限度提升这一复杂机电系统在维护、升级、维修等方面的快速性和简便性,并且通过合理设计的零部件,兼顾功能的多样性与生产工艺的低成本。
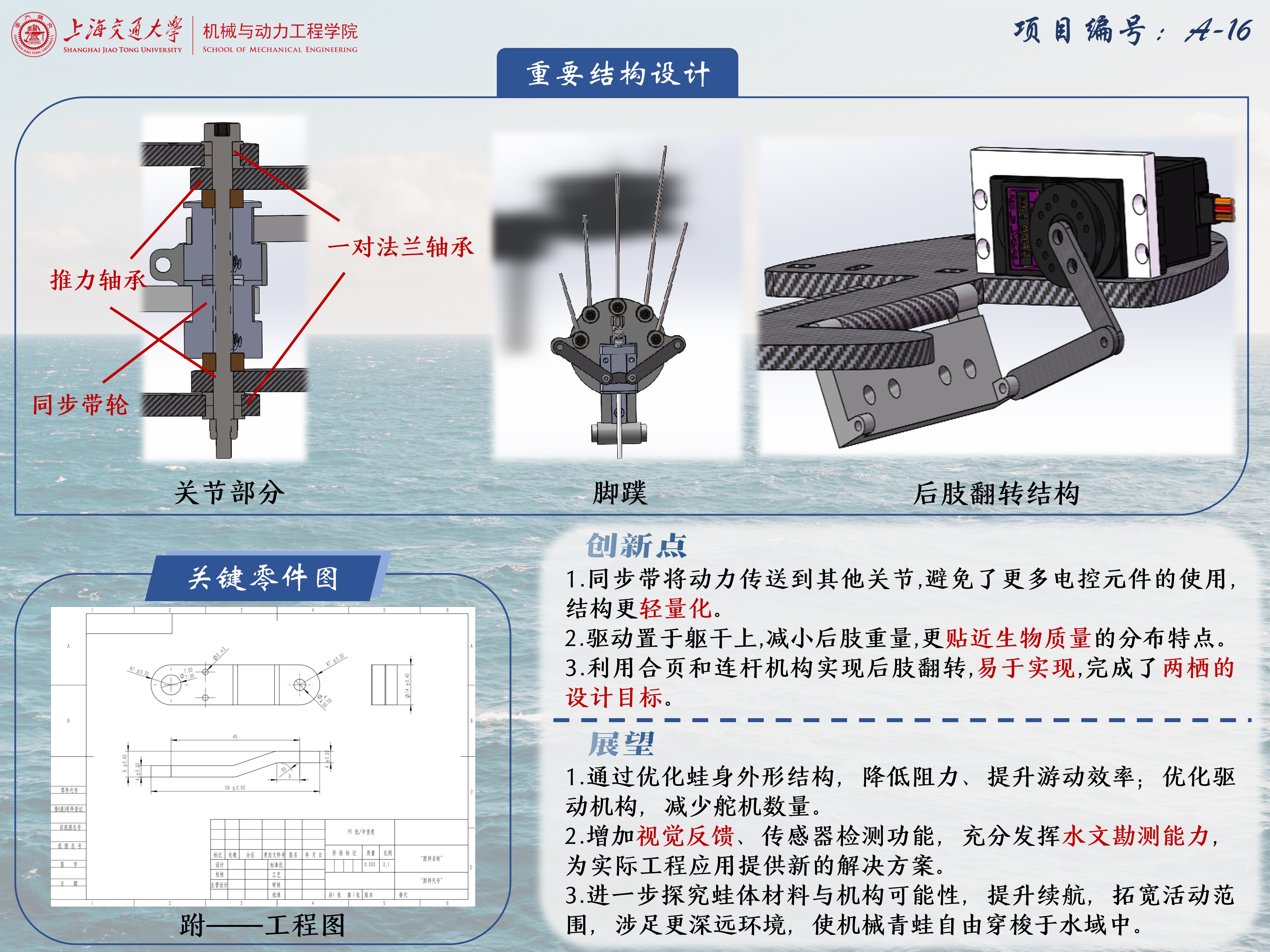
实现两栖功能:翻转合页,使后肢位于水平面,同时将前肢向上旋转到同一水平面上,青蛙便可在水上游动;翻转合页,使后肢位于铅锤面,同时将前肢向下旋转到同一铅锤面,青蛙便可在陆上站立。
采用后肢动力驱动:将驱动元件置于躯干上,减少青蛙后肢的重量,从而更贴近生物青蛙质量的分布特点;通过同步带结构将动力传送到其他关节上,避免了更多电控元件的使用,整体结构更加轻量化。
