

本项目的主要内容,是通过基于鳐鱼胸鳍结构的仿生设计,制作一款可以代替螺旋桨推进系统进行工作的、可搭载多种勘测设备的水下仿生工作平台。经过前期的市场调研与相关文献的查阅,项目小组设计了以凸轮、音叉结构为核心传动结构,直流减速电机为驱动装置、电缆传输为供能方式的项目方案,同时完成了项目QFD图的搭建,确定了工程措施优先级,并在最终完成了项目的整体设计与建模、模型的运动仿真动画以及关键零件工程图、整体结构爆炸视图等重要的项目目标。
1. 根据仿生鳐鱼胸鳍结构在不可压缩流体场中运动的动力学分析,设计符合流体动力学原理的胸鳍外形设计;
2. 胸鳍仿生结构的机械结构设计,并进行相关结构参数数值的拟定分析与优化,要求其具备高效率、低能耗、推进性能优良等特征;
3. 仿生鳐鱼水下机器平台的整体外形设计,要求其具有较为优良的流体动力学特性;
4. 确定仿生鳐鱼水下机器平台的传动、支撑结构,以及仿生鳐鱼胸鳍结构所使用的材料;
5. 确定机器平台在水下工作环境下的电控方式,并设计初步的防水结构与防水材料方案。
1. 完成了鳐鱼胸鳍结构在不可压缩流体场中运动的动力学分析,并通过查阅文献完成了可行性分析。
2. 通过市场调研与文献查阅完成了QFD图的搭建,并得到了相应的工程措施优先级。
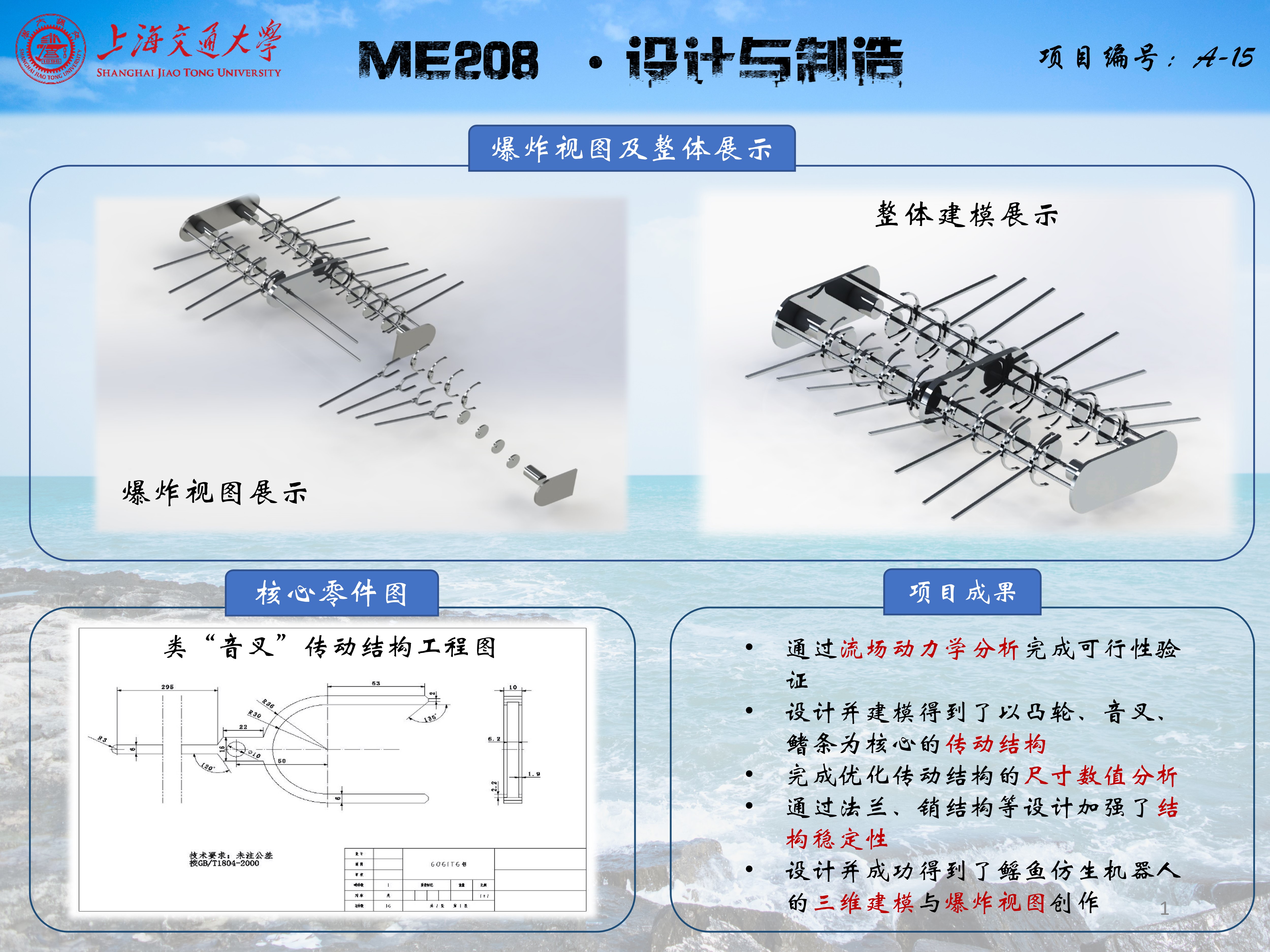
3. 设计并建模得到了以凸轮、音叉、鳍条为核心的传动结构,同时通过文献调研完成了尺寸数值分析,完成了对传动结构推进性能的优化。
4. 设计并成功建模得到了鳐鱼仿生机器人的整体三维视图,通过加入法兰、销、螺丝螺母等基本结构加强了结构稳定性。并完成了整体爆炸视图的创作。
