

2013年4月汉诺威工业博览会上正式推出,跟随机器人的开发与设计也已经成为一个稳步增长的研究趋势。与此同时,随着跟随行李箱、高尔夫车等产品的出现,极大地便捷了我们的生活。出于对自动跟随技术的浓厚兴趣,我们小组决定自行设计与开发一辆具有自动跟随功能的小车,作为我们对自己兴趣和自动跟随技术这块领域的初步探索和实践。在最开始的问卷调查和市场研究中,我们通过QFD分析发现,人们最关心的三个问题是跟随距离、避障距离和超声波的接收张角。
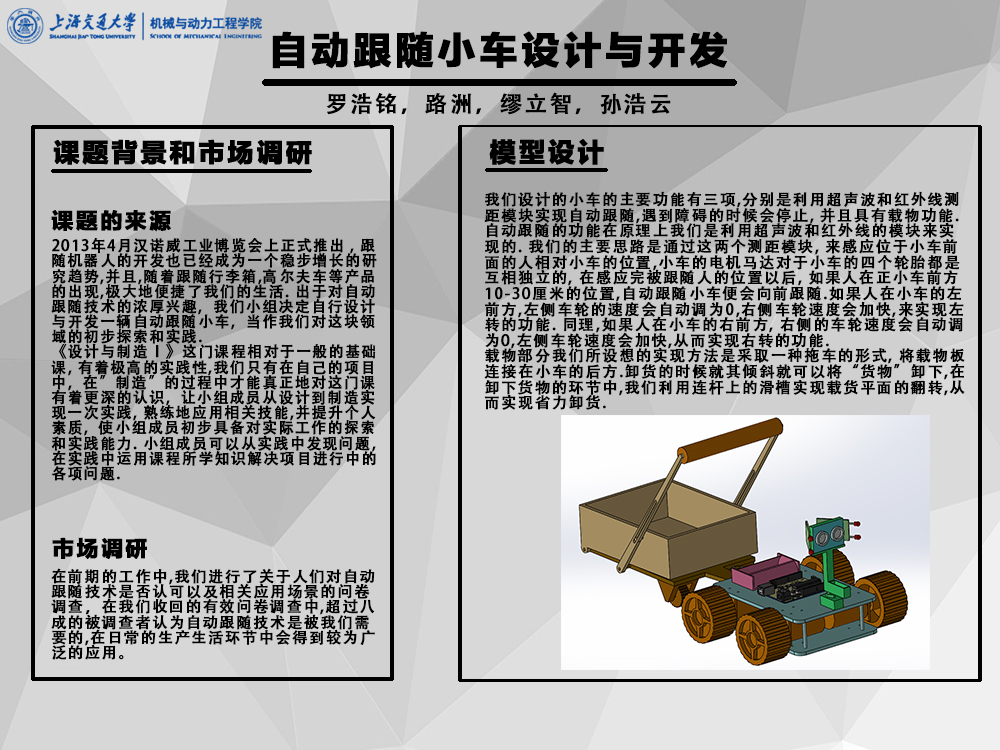
我们的主要目标是利用Arduino的主板加上超声波测距模块和红外传感器模块来实现我们所需要的自动跟随功能,并且用独立的四个马达控制车轮转动,这样的设计可以让我们的自动跟随小车感应到被跟随物品在他前方的位置,与此同时,也通过逻辑判定实现了遇到障碍自动停止的功能。除此之外,我们还要让我们的自动跟随小车具有载物的功能,在载物部分使用了连杆和滑槽的结构设计,让我们在卸货环节可以使载货平台实现一个倾倒的功能。
我们完成了自动跟随小车的设计与开发,并利用标准件对其进行了制作。实现了基础的自动跟随和避障功能,自动跟随的最远距离能够在30厘米至40厘米之间,转向流畅且无卡顿。当我们将自动跟随距离加大时,会出现跟随的目标无法确定的情况,我们认为应该再设计一个有着发送信号功能的部分让被跟随的人携带,这样可以让小车的跟随目标更加明确。关于载物部分我们完成了3D建模部分,实物部分由于时间原因我们未能完成制造和组装。
